Paso 1: Problemas - movimiento


Primero dos partes en el video (enlace en intro) sólo a montar pruebas al azar este y de que manera. La primera versión tenía especialmente las pequeñas poleas en ruedas y tenía poco par que movimiento recto, el robot solamente podría dar vuelta alrededor de su eje. Segundo medio tamaño poleas y era capaz de moverse, pero hacía aún mayor más adelante cuando los sensores actúan como frenos y también era deseable para hacer más lento. Que todavía no era suficiente frenar abajo y codifiqué también movimientos en impulsos más cortos en lugar de continua.
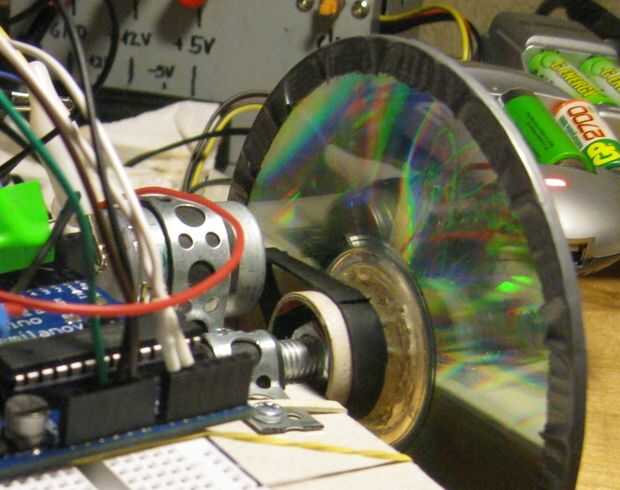
El adjunto de sensor final también fue la "rueda". Parte crucial con la frenada era conseguir equilibrio adecuado para que las ruedas motrices tenían resistencia mínima de la rueda (peso en el centro) sino que también lo caiga al otro lado. Para que la batería pack en la parte inferior era perfecto. Si alguien planea construir dos robot diferencialmente conducido de rueda te recomiendo mantener un margen alrededor de la batería para ajustar el balance.
Imágenes de poleas de rueda en sentido contrario de las versiones.




")

")

")

 Chasis de plataforma-un Robot robótica Arduino DIY de piezas de repuesto")


