Paso 3: Conectar el sensor IR

Hay una amplia gama de diferentes sensores que se pueden utilizar con Arduino.
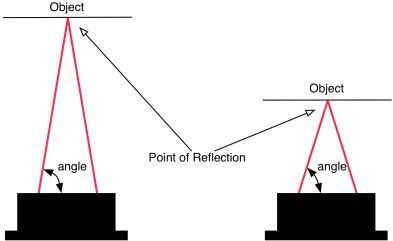
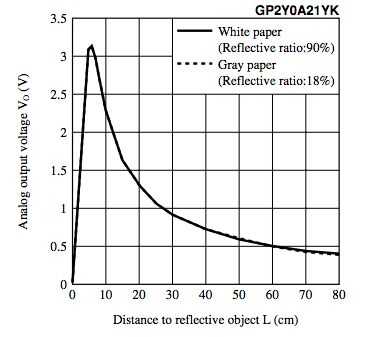
Utilizamos un sensor de distancia infrarrojo Sharp (GP2Y0A21YK0F) para medir las distancias de los objetos a tu robot. Su rango se limita de 10cm a 80cm.
Es fácil de conectar este sensor para Arduino. Echa un vistazo en el diagrama de cableado.
Conecte los cables como se muestra: * + (cable rojo) al pin de 5V + * tierra (cable negro) a uno de los pines GND * Señal (cable amarillo) al pin A0
Utilizaremos dibujo siguiente para calibrar el sensor de distancia infrarrojo (ver anexo).
El bosquejo convierte la tensión de valores leen desde el primer pin analógico (A0) a las distancias en centímetros. Para ello, utiliza una tabla precargada (matriz de 2 dimensiones) que se asigna el valor medido a su correspondiente longitud en centímetros. Es importante tener en cuenta que Arduino usa un 10 bits convertidor analógico a digital. Esto significa que el valor leído de los pines analógicos (0V a 5V) será traducido en valores enteros entre 0 y 210-1 = 1023. Si abre * Herramientas → Serial Monitor * después de compilar y cargar el sketch, verá el valor analógico actual y la distancia correspondiente en el objeto delante del sensor.
Puede comprobar la medida mediante la colocación de un objeto alineado a un gobernante y coincidencia de la salida de la serie. Si no es lo suficientemente precisa, debe afinar los valores de la tabla hasta alcanzar el nivel de precisión que necesita.
¡ Felicidades! Apenas aprendió a leer la salida de un sensor de distancia IR!













