Paso 4: Conectar el Servo motores
Hay una amplia gama mecanismos que pueden ayudar a nuestro robot para moverse. Los más comúnmente utilizados son los motores DC, motores paso a paso y servos. Se utilizan servos de rotación continua para.
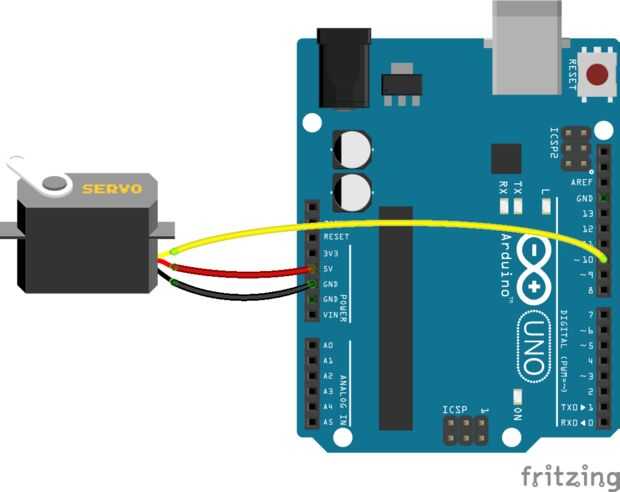
Los servomotores tienen tres hilos: alimentación (rojo), tierra (negro o marrón) y señal (amarillo, naranja o blanco). Conectan como sigue:
- energía para el pin de 5V de la placa Arduino +
- tierra a un pin GND de la placa Arduino
- señal de un pin digital en la placa Arduino
Si usted quiere aprender cómo el trabajo, quizás estés interesado en este artículo.
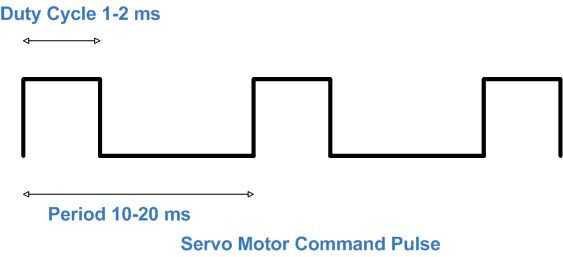
Al principio se calibrará los servos. La calibración puede realizarse en software y hardware. En el primer caso tendrás que hacer ajustes con el potenciómetro. En este último caso desea ajustar pulso cambiando los parámetros pasados a la función 'writeMilliseconds'. Más tarde usted controlará dos servos, por lo que sugerimos que calibre el potenciómetro para que coincida con el software, con el fin de tener el mismo valor base para ambos motores.
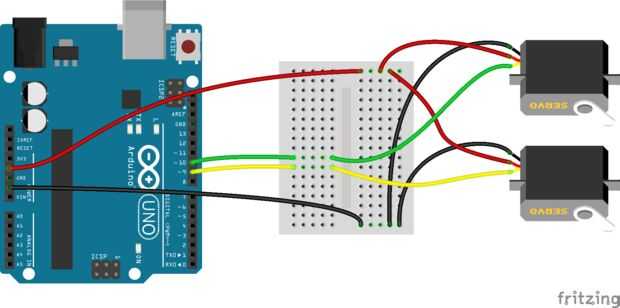
El esquema siguiente nos ayudará a calibrar los servos. Cambiar para funcionar el servo de velocidad cero y ajuste la posición del potenciómetro para asegurar que en velocidad cero es realmente no hay rotación.
Luego conectas dos servos a la vez para controlar simultáneamente. Echa un vistazo en el diagrama de cableado.
Necesita cambiar un poco el bosquejo para controlar ambos servos al mismo tiempo. Echale un sketch para el código completo.













