Paso 6: Robot "cuerpo"

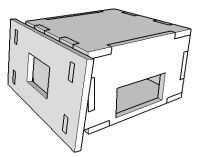
Tendremos que preparar varias partes construir "cuerpo" de tu Robot:
- Partes principales de la construcción (corte de madera o plexiglás)
- Tornillos y tuercas para fijar los servos, sensor del IR y las ruedas (que probablemente necesitará algunos deben ser comprados en tienda)
- Ruedas (imprimidas en impresora 3D)
- Neumáticos (anillos)
Puede tomar modelos de repositorio de archivos adjuntos o y conseguir que en el espacio más cercano de hacker.
Entonces usted necesitará unir todas las partes del robot y hacer agujeros.
Tan pronto como preparements todos se hacen fijar servos a los paneles laterales con tornillos de (12mm M2). Tenga en cuenta que el eje del servo debe estar alineado más a la parte trasera del cuerpo de robot. Fijar entonces el sensor de infrarrojos del panel frontal también con tornillos de (6mm M3). A continuación tire de los cables a través de agujeros en el frente y traseras para que todos ellos salgan en la parte posterior. Luego tomar mini breadboard y pegarlo con cinta adhesiva 2 caras de panel posterior.
Use tres tornillos de (12mm M2) para montar la placa de Arduino en la parte superior del cuerpo. Usted puede poner un pedazo pequeño de material entre el panel y junta para evitar el contacto entre sus superficies (o simplemente para montar mejor). Espaciadores de plástico pequeñas son también una opción.
Fijar a rueda y alrededor de los tornillos con tornillos. Entonces puso el anillo de goma de la rueda. Poner la rueda en el eje del servo y fijar con tornillo.
¡ Felicidades! Está casi listo!













