Paso 14: Calibrar los Servos
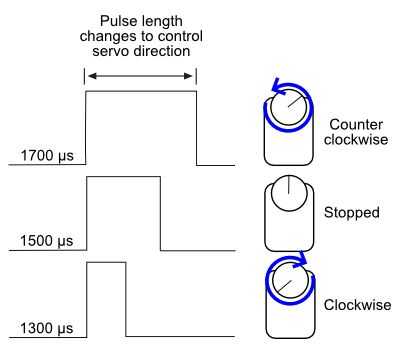
Este robot utiliza Servos de rotación continua de paralaje. Usted comunicarse en estos servos mediante modulación de anchura de pulso. Modulación de anchura de pulso, en esencia, nos consigamos una variedad de voltajes de salida usando solamente un voltaje que es "pulsado" alta y baja. El valor promedio del pulso devuelve una variedad de voltajes entre el alto y bajo valor. Para este proyecto, la duración de estos pulsos es lo que controla la velocidad y dirección de los servos. Cada pulso es de 1300 a 1700 microsegundos (μs) duración: un microsegundo es una millonésima de segundo. Estos servos se construyen tales que:
- 1300 μs: gire hacia la derecha
- 1500 μs: detiene el motor
- 1700 μs: gire hacia la izquierda
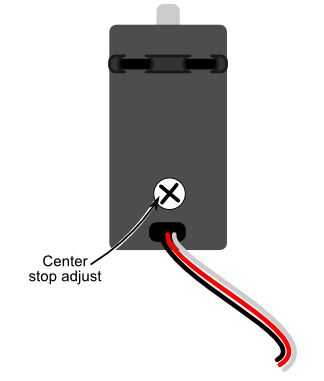
Sin embargo, algunos servos no dejará en exactamente 1500 μs debido a ligeras diferencias en los circuitos electrónicos. Puede que necesite ajustar la mecánica del servo para que el motor se detiene cuando se suministran pulsos de exactamente 1500 μs.
Utilizar el potenciómetro situado en la parte superior del servo (ver imagen incluida) para calibrar su punto de parada. Primero, conecte el cable rojo del servo a la fuente de alimentación puede utilizar (yo usé una batería recargable de 12V detrás), su cable negro a tierra y su cable blanco al pin pwm 10. Ejecute el código de calibración para aplicar un flujo de 500 μs pulsos al servo, ms 20 apart. El código de Arduino puede encontrarse también en el sitio web de Parallax aquí. Mientras se ejecuta el código, ajuste lentamente el potenciómetro usando un pequeño (#0 o #1) Destornillador Phillips. Ajuste la olla hasta que el motor se detiene.













