Paso 5: El Robot
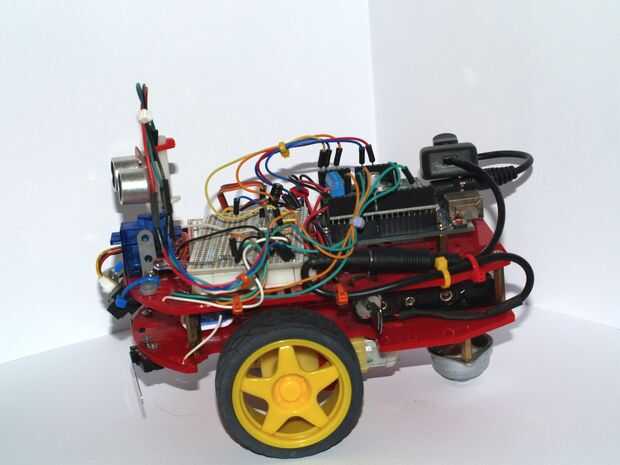
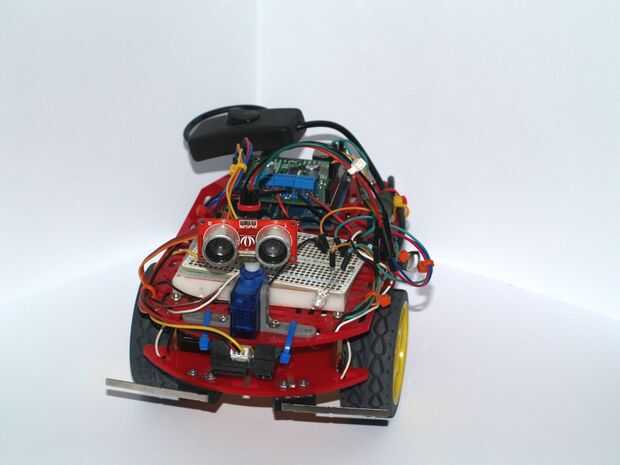
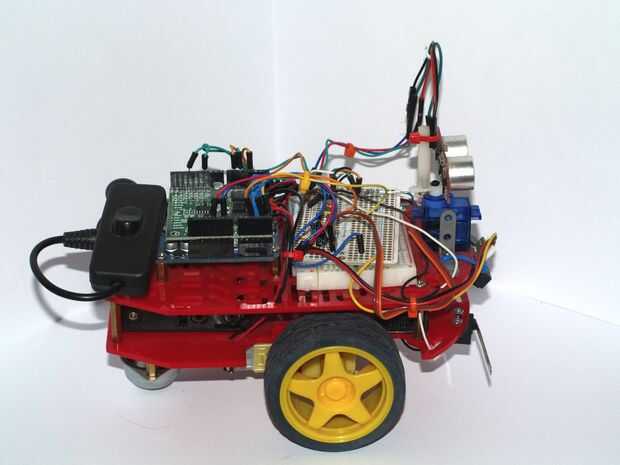
El Servo actúa como cuello de los robots, puede activar el Sensor de ultrasonidos en varias direcciones. El Sensor ultrasónico se utiliza para detectar los obstáculos, que el robot será entonces evitar, demasiado bajo para el Sensor de ultrasonidos detectar los interruptores del disparador se presiona y el objeto puede entonces evitar las obstrucciones. El foto resistor se utiliza para detectar el nivel de luz y si se considera demasiado oscuro el LED se encenderá. El sensor de infrarrojos se utiliza para detectar gotas, para que el robot no se caiga una gota vertical, como un paso.
Los dos motores DC del chasis del mago están conectados al protector de Motor, el motor izquierdo a los dos terminales más izquierdos en el escudo y el motor adecuado a los dos terminales de tornillo más adecuados en el escudo. Los 2 terminales media en el escudo se utilizan para alimentar los motores; la batería de 9V debe conectarse a ellos. (Sólo tenga en cuenta que si uno o ambos de los motores de los robots se mueven en la dirección opuesta de lo esperado, esto puede corregirse cambiando los 2 cables del motor alrededor entre los terminales que están conectados a la pantalla motor.)












")
