

Mi primera guía en instructables: D, esta semana he construido un robot de 15 x 18 cm (extensible) prototipo para la próxima competencia de robótica aquí en Filipinas.
Quadcopters, aerodeslizadores, aviones, helicóptero, lo que sea, que están recibiendo mucho más común en estos días. Así que pensé de la construcción de algo nuevo y único para la comunidad DIY. Un robot multiuso que puede adaptarse con más juegos de robótica como sumobot, seguidor de línea, de prison break, romper hacia fuera y para diversión bluetooth solo piensa en algo bonito... .code añadir algunas piezas en este bot y se hace un robot de trabajo. ¿2WD? ¿4WD? que no hay prob
ESQUEMÁTICO Y PCB LAYOUTS YENDO A TRAVÉS DE LA GUÍA
¿ROBOT multiuso?
Intencionalmente planeaba hacer un sumobot de estilo japonés pero luego me di cuenta de que carecía de recursos y la maquinaria para hacer el marco. Así que con mis piezas de chatarra de robots viejos reciclé la mayoría de las piezas a fabricar nuevos circuitos y conectar sensores útiles para hacerla compacta y confiable.
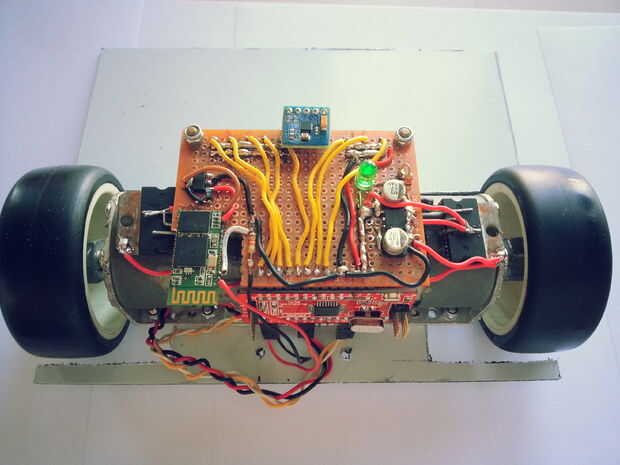
Especificaciones:
Bluetooth compatible
Especificaciones clave de motorreductor POLOLU Metal a 12 V: 500 RPM y 300 mA recorrido libre, 84 oz-in (5 kg-cm) y 5 A calarse.
Li-po batería 1300 mah 4s
Giroscopio de 3 ejes ITG3205
Acelerómetro de 3 ejes BMA180
Sensor de presión BMP085
Magnetómetro de 3 ejes HMC5883L
2 x driver motor L298
Arduino mini clon
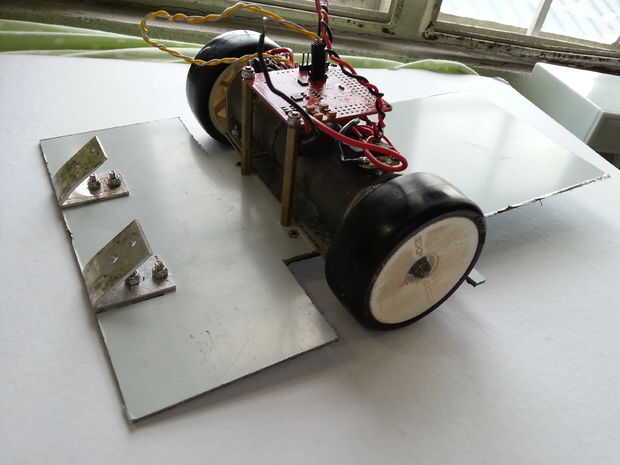
SENSORES DE PROXIMIDAD SHARP
Sensor de matriz de reflexión.
MARCO DE FIBRA DE VIDRIO
FUENTE DE ALIMENTACIÓN REGULADA DEL MOTOR
¿Por qué se equipa de un módulo de brújula? y todos los otros sensores
Todos sabemos que no todos los motores son balanceados por lo que decidí agregar un compás para hacer su movimiento de la dirección exacta en lugar de usar codificadores porque no tengo. Y los otros son para ideas futuras




")

 con Video Stream en vivo!!")
")





