Paso 8: IR SENSOR ARRAY (seguidor de línea)

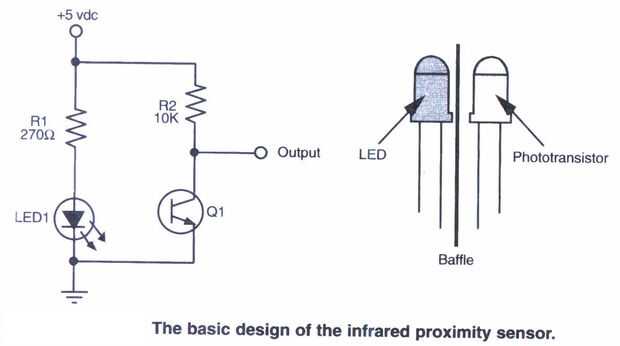
Para esta parte usted va necesitando un 1K y 10K resistencia que puede utilizar 220 para reemplazar 1K, pero de nuevo el sensor será demasiado sensible lo que hace difícil calibrar especialmente cuando la iluminación es diferente todo el robot.
USANDO en formato eagleCad editar el diseño según su arreglo del sensor con el esquema dado. Y si tienes alguna idea de mejora de la matriz del sensor díganos sus ideas en los comentarios estará esperando ~
Y para hacer el pcb en el chasis ver este vid o si realmente no se puede un marcador sería bueno para hacer tu diseño.
RECUERDA para hacer más sensores para el SUMOBOT configuración 2 no use el sensor de matriz para el sumobot porque esto no reaccionará a los bordes de tu robot rápidamente porque es más en el centro.




")

 con Video Stream en vivo!!")
")





