Paso 12: Programar el Robot - descargar el código y soporte de aplicaciones
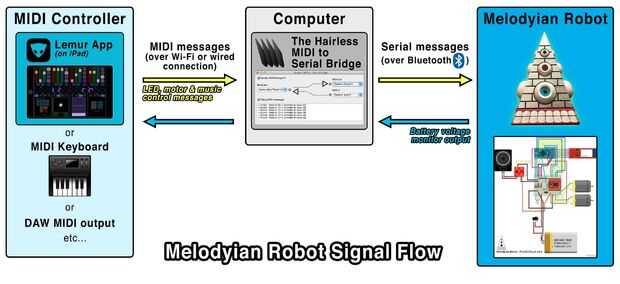

Después de que has montado tu circuito para la prueba, hay unos pasos que deberás seguir para subir el código del Robot Melodyian a tu Arduino y la configuración Conectividad del robot control inalámbrico. Es un proceso algo implicado para conseguir todo de configuración, pero una vez terminado te podrá controlar inalámbricamente tu robot con mensajes MIDI.
1. primero, cabeza encima a nuestro repositorio de GitHub para descargar el código del Robot Melodyian. Esto incluye el código de Arduino completo necesario para que funcione tu robot así como una interfaz de controlador de robot personalizado que hemos diseñado la aplicación Lemur.
(Lemur es una aplicación de controlador MIDI disponible para iOS y Android. Permite transmitir datos MIDI forma inalámbrica desde su dispositivo móvil al ordenador mediante una conexión WiFi. Hemos probado nuestro archivo de plantilla de Lemur en un iPad con ordenadores Mac).
2. Si usted quiere hacer utilizar nuestra hecha de antemano Lemur interfaz de control para controlar fácilmente el robot sin utilizar su propio controlador de MIDI, descarga e instala el Lemur en su ordenador y iOS / Android dispositivo. (Nuestra interfaz de lémur está diseñado para un iPad).
-Si no desea utilizar la interfaz de Lemur, puede hacer referencia el archivo de código de Arduino "midicc.h" para ver que CCs MIDI el robot programado para responder a y configure su propio controlador de MIDI para la transmisión de los datos de MIDI correspondientes.
3. a continuación, asegúrese de que has descargado e instalado al último driver FTDI en el ordenador así que usted puede cargar código para el Arduino Pro Mini con su cable FTDI. Aquí está un útil Guía sobre cómo hacerlo.
4. descargar el sin Serial / MIDI puente aplicación. Esto se utiliza para establecer una conexión en serie entre el controlador de MIDI (lémur en nuestro caso) y el Arduino.
-Hacer que configurar preferencias de serie sin pelo a lo siguiente:
• Baud rate: 57600
• Bits de datos: 8
• Paridad: ninguno
• Bits de parada: 1
• Control de flujo: ninguno













