Paso 14: Activar el Robot - establecer una conexión inalámbrica
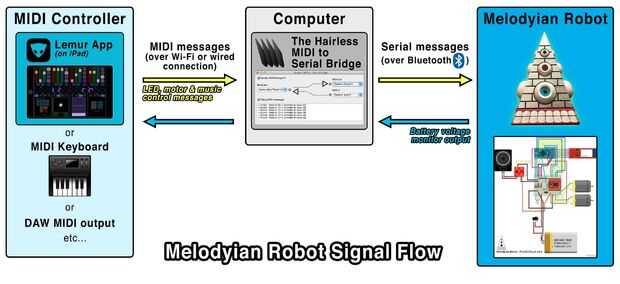
1. después de que el código es cargado, desconecte el cable FTDI de la computadora y el Arduino, conectar el transceptor Bluetooth a tu Arduino, vuelva a conectar la batería a tu circuito y la energía en el Arduino. (Una vez accionado, usted debe ver que un rojo intermitente LED el Bluetooth Mate plata como indicador iluminado LEDs en todos los CIS en el circuito.)
2. • si utiliza Lemur con nuestro interfaz de controlador personalizado:
-Activar el Daemon de Lemur en su computadora. (Lemur recomienda establecer una conexión Wi-Fi entre su ordenador y iPad o tablet Android en lugar de conexión a través de router de red para reducir la latencia de rendimiento. Encontramos que este funciona bien!)
• Si utiliza su propio controlador MIDI: Asegúrese de que ha encendido y conectado al ordenador en este momento.
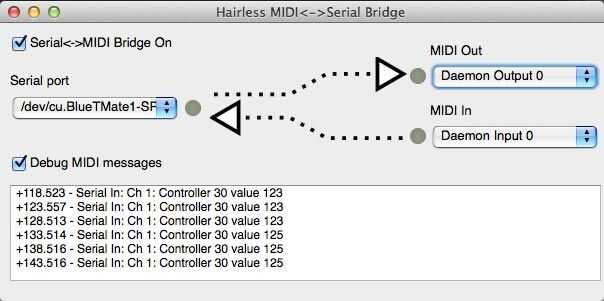
3. iniciar el MIDI sin pelo / serie puente aplicación, configurar las preferencias de conexión entre Lemur (o su propio controlador MIDI) y el Arduino y establecer la conexión:
-Definir Lemur Daemon (o su propio controlador MIDI) canales de entrada/salida como MIDI in/out puertos
-Seleccione la dirección del puerto serial del transceptor de Bluetooth como puerto serie.
-Haga clic en la casilla de verificación establecer una conexión con Arduino.
- Si tiene éxito, verá cambiar conexión indicador de compañero Bluetooth de rojo a un color verde y valores enteros enviados su Arduino como MIDI CC 30 comienzan a aparecer cada pocos segundos en la consola de depuración de Pelón (estos valores MIDI CC de Arduino son lecturas de escaladas de nivel de voltaje de la batería del circuito, 127 = nivel cargada de 4.2V+)
- Si eres no da resultado, intente desactivar y volver a comprobar la casilla de verificación o dejar de fumar y relanzar la aplicación sin pelo. A veces puede tomar varios intentos para establecer una conexión sólida.
Una vez que el indicador LED en el transceptor de Bluetooth es una sólida y ha confirmado que el Arduino está conectado al Pelón, han realizado con éxito una conexión inalámbrica. Ahora es el momento para activar el robot con el controlador MIDI.













