Paso 4: codificación...
En este paso voy a explicar el primer acercamiento junto con la configuración.
INSTALACIÓN: Descargar ArduinoIO desde el enlace en la página de materiales y lo instalamos en su Matlab tal como se indica en los pasos de instalación que viene junto con el paquete. Si todavía hay algún comentario del problema a continuación.
Ahora descargar y guardar todos los archivos en este paso al directorio de Matlab excepto adioes.ino. Adioes.ino Uplaod a tu arduino
Conectar tu arduino a tu PC swich en la fuente de alimentación, conecte los altavoces a su PC.
Primero calibrar tus servos como sigue:-
Tipo a=arduino('COM#'); en lugar de # escriba el número de puerto de tu arduino que se puede encontrar en el arduino IDE o el administrador de dispositivos.
servoAttach(a,9);
servoAttach(a,8);
servoWrite(a,9,90);
servoWrite(a,8,90);
Ahora Asegúrese de que los altavoces queden hacia arriba y todo recto.
Añadir tus archivos de audio en el directorio de matlab
Escriba lo siguiente en la línea de comandos de su matlab para iniciar tu robot musical.
trialnew('filename',a); nombre de archivo es el archivo de audio por ejemplo booyah.wav.
Y listo!
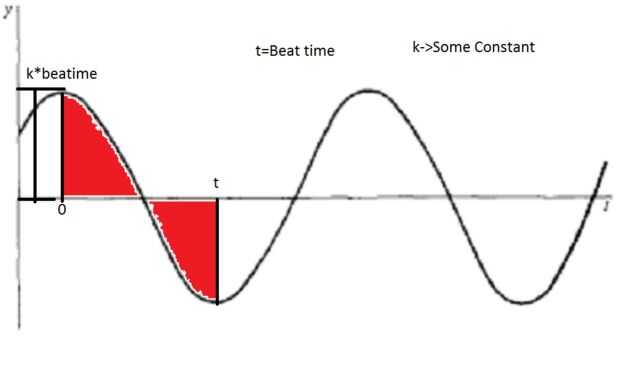
Explicación del código: trialnew función ocurre en el objeto archivo y arduino audio como entrada luego extractos de sus tiempos de golpe (que no se puede explicar aquí) luego estimar su tempo para el primer segundo de la canción.
Entonces construye una trayectoria de ángulo que es una onda de coseno que el bot flequillo intensidad correspondiente a la longitud de tiempo beat y beat. Luego agrega el tiempo venció al temporizador y calcula el tempo el siguiente segundo. Construyendo así el movimiento de los servos de ambos.













