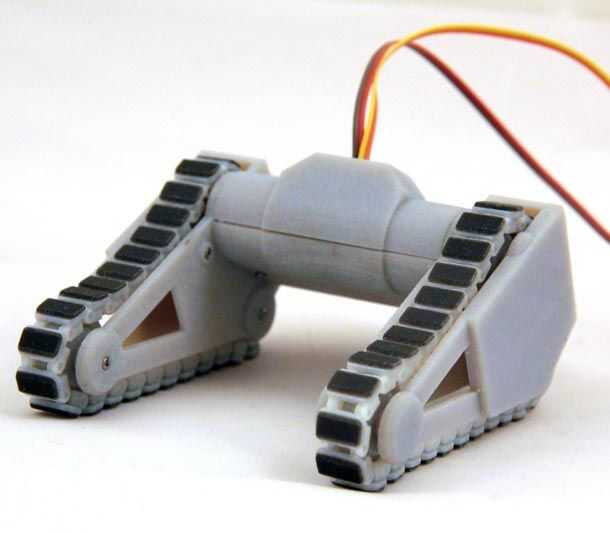

Durante noviembre de 2012 fue de suerte jugar como artista en residencia en la sede de Instructables y fue dado acceso completo a una habitación llena de objetos Connex 500 varias impresoras 3D material! Siempre había querido una versión de juguete de la robusteza de corto circuito, Johnny cinco, y me encontré con los medios para imprimir uno a mi alcance.
Más adelante iré añadiendo componentes a este robot hasta que tenga un modelo terminado y funcional. Porque estaba más preocupada por conseguir la base realmente función de con que sea una réplica exacta del robot Johnny 5, así que improvisar un poco con el diseño (también conocido como: licencia de artista.)
Trivia de bono: El diseño original para el robot de J5 fue creado por un artista del concepto llamado Syd Mead. Mead es mejor conocido por su trabajo de diseño para las películas Blade Runner y Tron, y es considerado a un Dios entre la comunidad de dibujo concepto. Muy sugiero echar un vistazo más profundo a su obra.
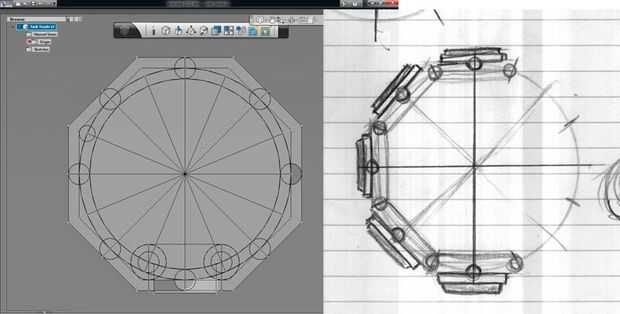
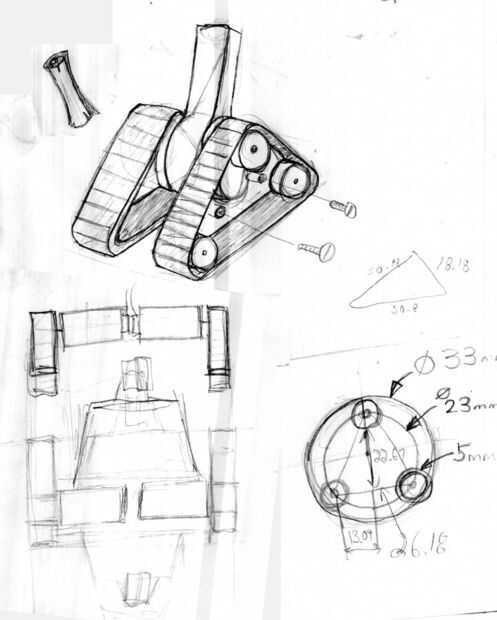
Para empezar, saqué un puñado de bocetos lápiz bruto solo para darme una idea de cómo podrían trabajar los peldaños y eventualmente mudaron la idea 123D beta 9. Una copia del modelo fue impreso, y los pedazos de la pista trabado juntos tal y como previsto.
Cuando llegó el momento para hacer este centro de la pista que he intentado construir alrededor de mi inicial el diseño de la pisada, pero la geometría no sólo funcionaría hacia fuera. Terminé a partir de cero, dibujando un cubo primero y una pista que se hace para caber alrededor de él. Las nuevas piezas fueron impresas, montadas y probadas. Felizmente, la mecánica de fluido como fueron hechos uno para el otro! Me retocaron las tolerancias por.05 mm o menos e impreso algunos docena enlaces.
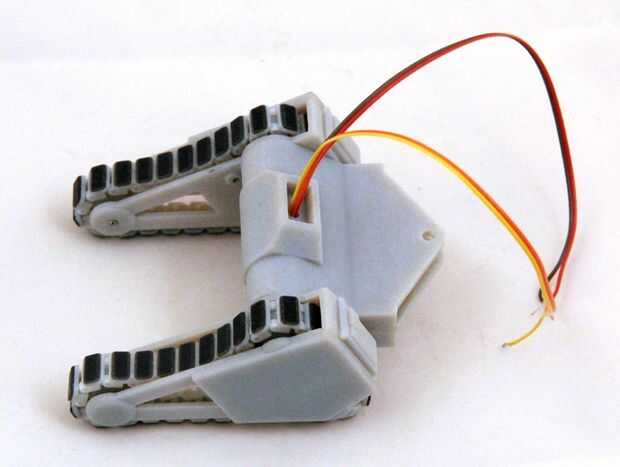
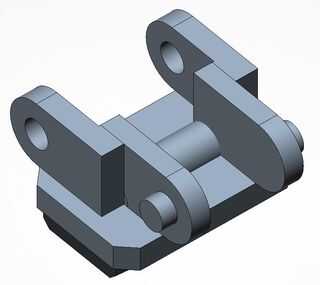
La base se lleva a cabo junto con corta tornillos de rosca de 0-80 que van por un lado de la caja y colocar los orificios en el lado opuesto. Aunque estos agujeros están incluidos en el modelo, y la impresora hacen, todavía encontré necesario utilizar brocas pequeñas para ajustar las tolerancias y retire el material de apoyo.
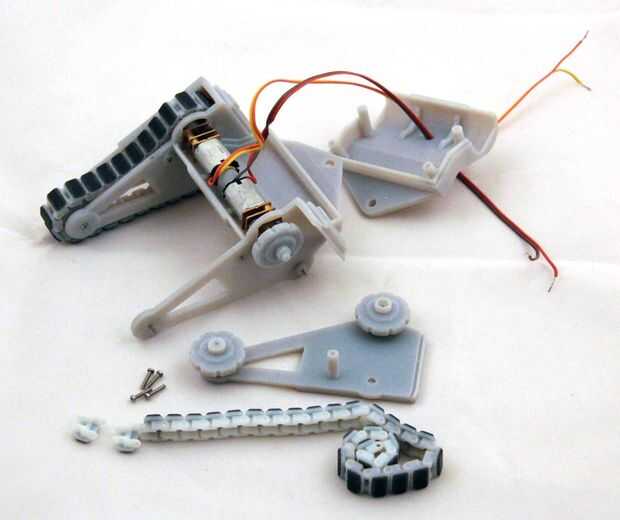
Motores están asegurados en su lugar con los montajes en las dos mitades de la base. Para conseguir los motores para caber perfectamente que terminé haciendo un modelo de los motores de dimensiones con un calibrador digital. Posteriormente, se diseñaron los soportes del motor alrededor de ese motor virtual.
Gracias por revisar mi proyecto. Mantener un ojo hacia fuera para más Johnny hacer progreso en la construcción. No dude en preguntarme preguntas, dar sugerencias y votar.


Desde este modelo 123D beta 9, pero han trasladado a Inventor Fusion. Ambos conjuntos incluyen archivos en formato DWG y STL.
La banda de rodadura incluye archivos de un solo segmento de la pisada, un centro único de unidad y un cubo de giro libre. Puesto que cada pedazo de la pista es la misma, se imprimen más copias del segmento de pista para hacer toda la longitud. El eje de impulsión está diseñado para encajar en una final de un pequeño engranaje motor principal, pero sin duda podría ser modificado para adaptarse a otros tipos. El cubo de giro libre se hace a equipada con un árbol y simplemente rodar junto a la pista.
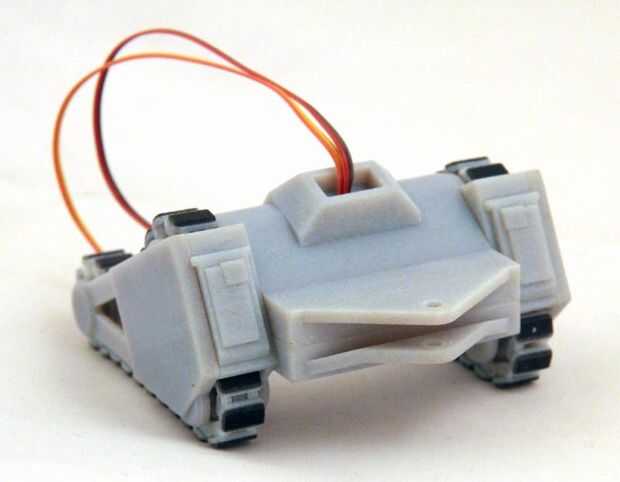
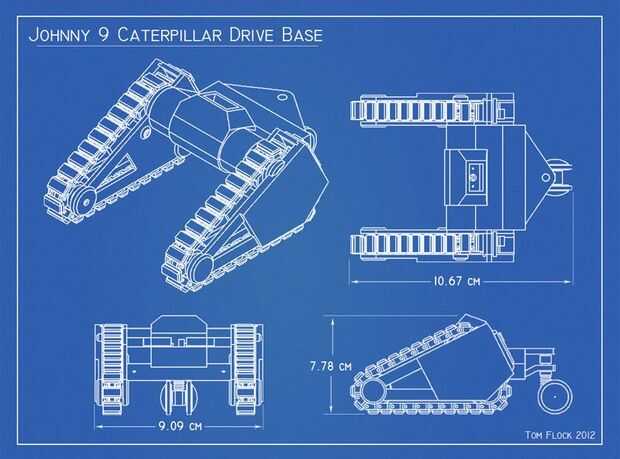
Johnny9 Base sistema contiene los archivos de la unidad la base como se ve en las fotos.
Archivos del Pequeño Motor del engranaje de bronce para el motor solamente y están destinados a ser utilizados como referencia


")








")
")
