para ver todos los posts que hice en este robot, por favor revise mi perfil de g +,
https://Plus.Google.com/+jeromeianbuhisan/posts
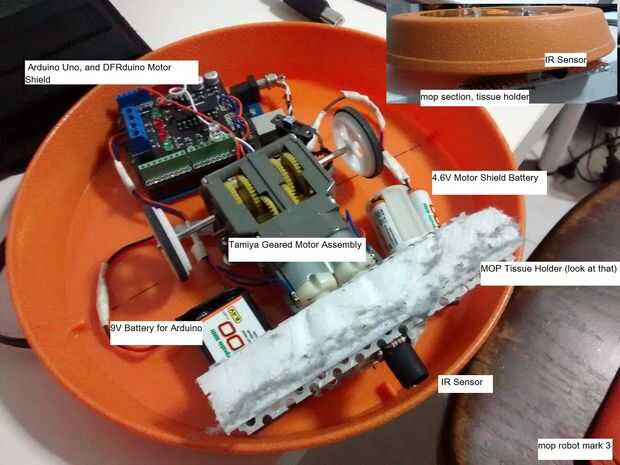
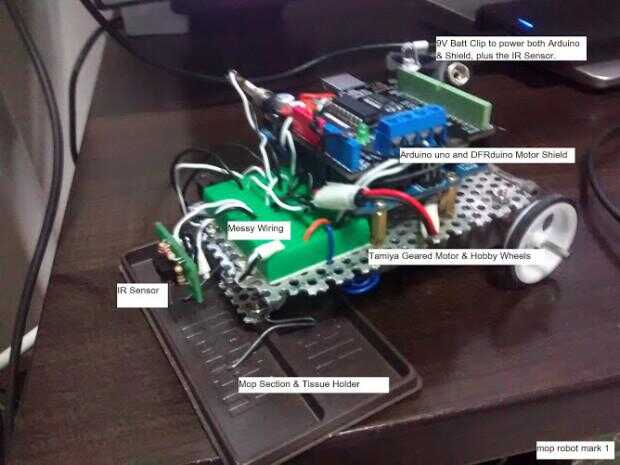
mi intención original era construir un robot seguidor de línea, hasta que la tarea familiar de mi esposa me llamó la atención. desde entonces mi enfoque estaba en crear un robot similar a roomba, menos el vacío. :]
el diseño original era un poco de un cableado voluminoso, pero funcionó bien, sólo en una batería de 9V solo para alimentar el arduino uno, escudo del motor y un sensor de infrarrojos. Luego leí algunos posts que esto era una mala idea por lo que tuve que dividir poderes para el arduino y el escudo del motor y la sección de fregona consiguió también dio para arriba después de golpear varias veces a altas velocidades.
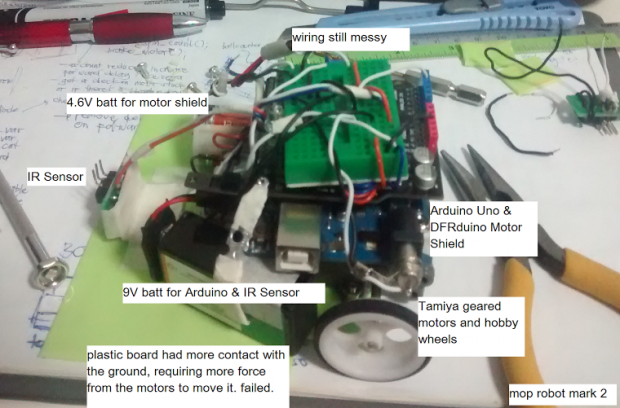
el 2 º diseño tenía un defecto que no piense. coloqué todos los componentes en la parte superior una placa de plástico plano que significa que hay más superficie en contacto con el suelo. Esto significó más fuerza de los motores para moverlo. no se pudo.




")

")





")
