Paso 3: Poner todo junto
colocación de las piezas es importante; la rueda en conjunto engranado del motor tendría que estar centrada en la maceta redonda, puesto que se trata de en contacto con el suelo. es como un subibaja... una vez que los motores de avance, el robot todo se inclina hacia adelante, por lo que será el peso en el tejido de la fregona.
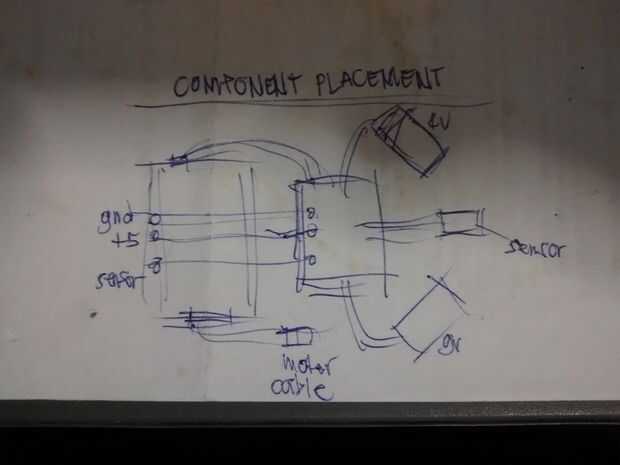
en la imagen adjunta, el bloque central es un protoboard pequeño que puede ser escondido o colocado en otro lugar conveniente. Tenga en cuenta que la colocación de piezas se sumará a tu robot el peso y balance. he colocado las pilas, ya que necesito más peso en la parte delantera, presione en la sección de fregona. el arduino y el escudo están en la parte trasera, a contrapeso.
una nota sobre el sensor de infrarrojos; para aumentar la sensibilidad Envuelva una cinta aislante negra alrededor de él para formar un tubo apuntando hacia delante. Esto ayudará a eliminar la luz ambiental en los alrededores de interferir en las lecturas del sensor de diodo. me ayudaron cuando no puedo leer nada correcto de los sensores.
una vez que se ha planificado la colocación de componentes, vamos a ir al cableado.




")

")





")
