Paso 4: Cableado cosas juntos
hay mucho que aprender de arduinos y no cabrá este instructable, así que lea tanto como usted puede antes de dirigirse al cableado actual. Esto es donde usted necesita utilizar el tablero de pan, para poner a prueba las cosas antes de finalizar las conexiones en el robot.
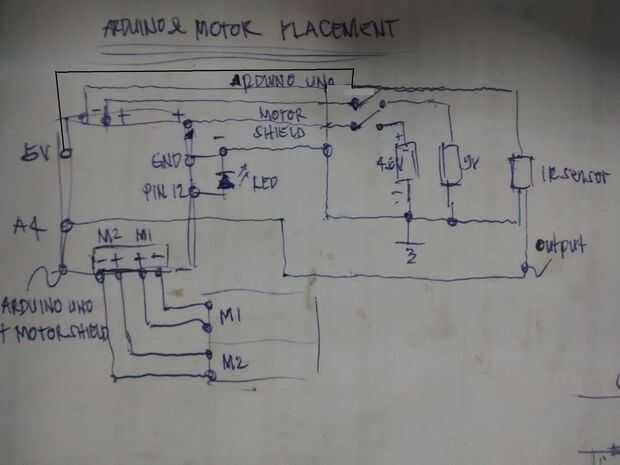
primera en el arduino. hay una energía terminal en arduino que permite suministrar 9V en él. Esta conexión de energía tiene un conjunto de reguladores y asegura que lo que va a la IC es un 5V seguro. luego puede presionar desde el pin de 5V para alimentar el sensor IR. el sensor infrarrojo tiene 3 pines, vcc, tierra y un pin de salida. su funcionamiento es cuando detecta un obstáculo, el sensor recoge más luz y le dará un voltaje correspondiente, que detectamos del pin A1 en el arduino. así conectar la clavija de salida del sensor al pin A1 en el escudo de arduino.
en el escudo del motor; usted tiene que asegurarse de leer mucho en los manuales para su escudo del motor. terminé fumando el arduino una vez porque malinterpretar las etiquetas de pin en el escudo. Algunos consideraron idóneos para separar el suministro para el escudo del motor desde tu arduino, por eso tengo una fuente de 9V para el arduino y un 4.6V fuente de escudo del motor y los motores. Además, no utilice una batería de 9V para el protector de motor, tiene menos potencia y no durará mucho tiempo. Usted puede alimentar el + voltaje de las baterías a un interruptor DPDT. salida va al respectivo + vcc de pernos para el arduino y el motorshield.
conectarse a los motores; el escudo del motor tiene 4 pines que sale de él; M1, M1-M2 +, M2-. conectar directamente a los motores M1, M2. Algunos motores no tienen +, - etiquetados en ellos, eso es fino. Podemos determinarlos de código más adelante.
hay que probar las conexiones primero en el protoboard, antes de ponerlos en el robot. Tenga cuidado con las conexiones de tierra y positivo, especialmente en el arduino. no puedo explicar cómo miedo es ver la placa emitiendo humo :D




")

")





")
