Paso 3: El servo Motor

El servo tiene una conexión de 3 hilos: alimentación, tierra y control. Se debe aplicar constantemente la fuente de alimentación
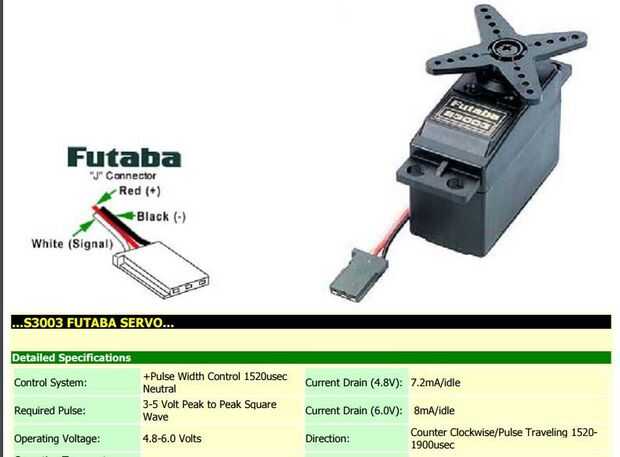
La señal de control es la anchura de pulso modulada (PWM), pero aquí la duración del pulso positivo curso determina la posición del eje del servo. Por ejemplo, un pulso de 1.520 milisegundo es la posición central para un servo Futaba S148. Un pulso más largo hace que el servo gire a una posición hacia la derecha del centro, y un pulso más corto hace que el servo gire a una posición de izquierda derecha de centro.
He utilizado Futuba s3003 servo - la conexión es muy simple el "+" & "-" va a la Junta del L298 como se indica anteriormente. Es importante mirar el voltaje de funcionamiento del servo (en mi caso su V 4.8-6 ver imagen de arriba), el cable de señal debe ser conectado a la salida GPIO, normalmente su blanco o naranja
Control de servo motores en frambuesa pi puede ser complicado pero es muy potente biblioteca acogió a RPIO. PWM, para instalar en pi uso el siguiente código
Para saber más sobre RPIO. PWM y el DMA que utiliza, consulte el enlace https://pythonhosted.org/RPIO/pwm_py.html




")

")



")


