Paso 5: Opcional - añadir cierta lógica de datos para reducir las necesidades de PWM
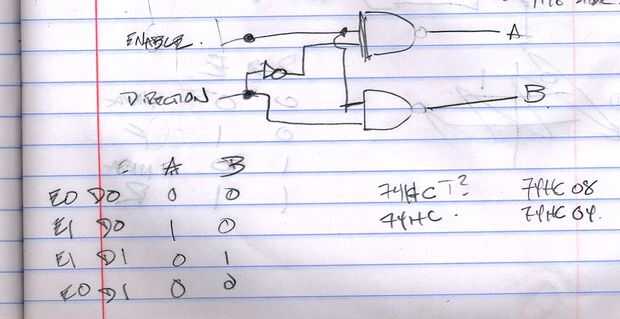
Me acostumbré a pensar en las ruedas del robot en cuanto a control de dos pernos, habilitar y dirección. El pin enable fue donde pones la señal PWM y la dirección era un simple ejecutable para avance/retroceso. Así que necesita sólo dos señales PWM para el robot, uno para la izquierda y otra para el derecho. Aquí es mi lógica digital rápida y sucia para él. Iba a utilizar simples circuitos TTL y un par de Chips 74HC,
74HC04 - inversor hex
Puerta de 74HC08-quad 2-input y
Ahora por supuesto en mi cubo de piezas no tiene los portones y, tengo sólo puertas NAND. Por lo que iba a usar los inversores sobrantes del hexagonal para hacer el trabajo, y las dos fichas tendría todo lo que necesito. Que funcionaría, pero después de jugar con ella decidió no ir a los problemas - otra vez YMMV. Diré que en una placa sin soldadura se trata de un montón de cables.








")




