Paso 3: Controlador de Motor
El conductor del motor le permite fácilmente controlar los dos motores, así como gestionar la potencia de salida en ellos fácilmente. Por desgracia, con todo lo demás, sólo habrá bastantes alfileres para los motorreductores, así las capacidades de administración de energía no estará disponibles. Para conectar el conductor del motor, soldadura de las cabeceras que vienen con él a la Junta para una fácil conexión a un protoboard primero seguir a esta guía sobre la conexión a tu arduino, motores y alimentación. Yo había soldado mío con las etiquetas de conexión hacia arriba cuando se conecta a un protoboard, así que mejor me di cuenta de lo que estaba haciendo.
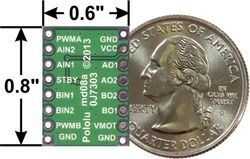
PWMA - PWM pin en microcontrolador //in nuestro caso, nos estamos saltando a la VCC
AIN2 - digital pines en el microcontrolador para el motor A (negativo)
AIN1 - digital pines en el microcontrolador para motor A (positivo)
STBY - pin digital en el microcontrolador, o atar a VCC
BIN1 - digital pines en el microcontrolador para el motor B (positivo)
BIN2 - digital pines en el microcontrolador para el motor B (negativo)
PWMB - pin PWM en el microcontrolador //ditto con PWMA
GND - GND del microcontrolador
GND - Masa de microcontrolador
VCC - VCC del microcontrolador (2.7V-5.5V)
OA1 - salida a plomo (-) del motor A
AO2 - salida (+) de motor A
BO2 - salida (+) de motor B
BO1 - salida a plomo (-) del motor B
VMOT - polo positivo de la batería del motor
GND - polo negativo de la batería motor
Nos se se salto las conexiones PWM y STBY a VCC, por lo que las clavijas de conexión de la PWMA, PWMB y STBY simplemente deben saltar a la misma fila que VCC (que debe tener una conexión a los pines de 5v o 3v de arduino)













