Paso 2: Armando el robot
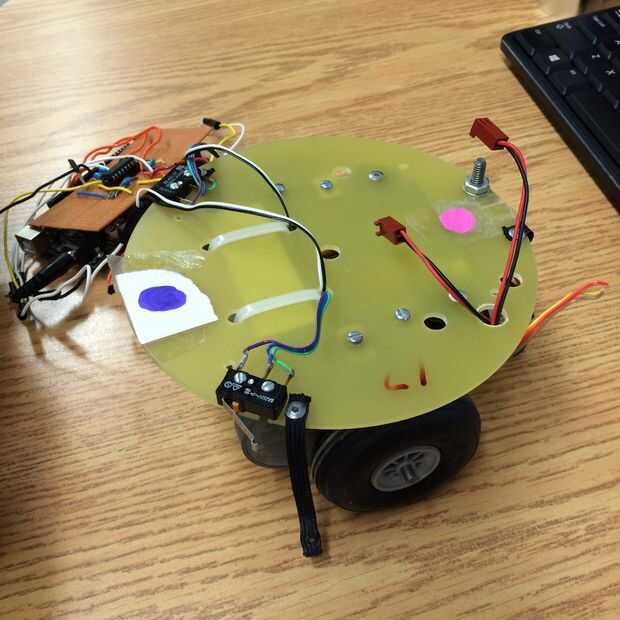
1. Taladre orificios en la base / o utilizar un cortador láser para cortar los agujeros para permitir que los cables para pasar
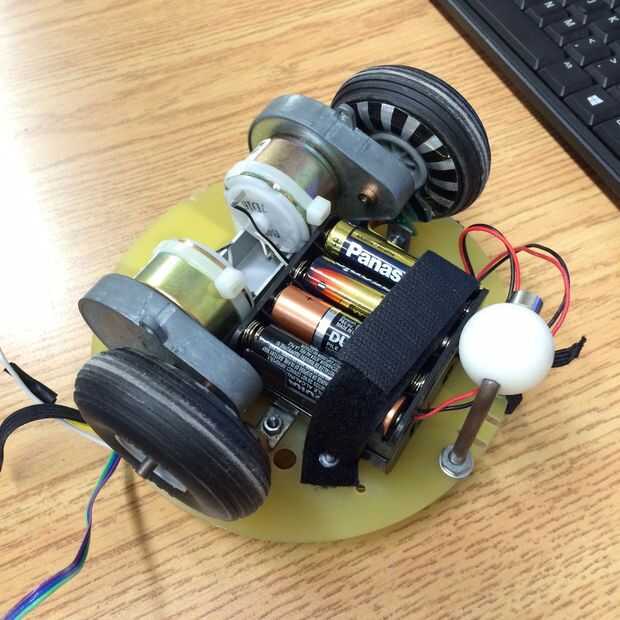
2. Atornille los motores, el portapilas a la base.
3. soldar los cables al final de los motores
4. obtener los cables en la parte superior de la base por lo que es más fácil conectarse a Arduino y la impulsión del motor.













