Paso 7: Circuito de vasos.
Dividimos en dos etapas: circuitos gafas y Servos
Permítanos empezar, paso 1: circuitos es los vidrios.

MPU6050 giroscopio
El sensor InvenSense MPU-6050 contiene, en un solo integrado, un acelerómetro MEMS de 3 ejes y un giroscopio de MEMS de 3 ejes. Con el giroscopio podemos medir la aceleración angular de un cuerpo sobre su propio eje, mientras que el acelerómetro puede medir la aceleración de un cuerpo a lo largo de una dirección. Es muy precisa, ya que tiene un 16 bits de AD converter (analógico a digital) para cada canal. Por lo tanto capturar canales x, y y z simultáneamente. El sensor tiene una comunicación protocolo estándar I²C y fácil interfaz con el mundo de Arduino.

Conexiones para Arduino Uno:
| GY-521 | ARDUINO UNO |
| VCC | 3, 3V |
| TOMA DE TIERRA | TOMA DE TIERRA |
| SCL | A5 |
| SDA | A4 |
Nota: El diseño y los enlaces están dirigidos sólo para Arduino Uno, pero el tutorial es válido también para todos los otros placa de Arduino. Lo único que cambia en las conexiones son el pin 2 I2C, o SDA y SCL (ej. Arduino Uno pin SCL encontrará en pin A5 mientras Arduino Mega pin 20). Sólo consulte la hoja de datos o investigación en google para encontrar entradas I2C de su Junta
En el extremo de la biblioteca de MPU6050 anexo.
Bluetooth HC-05

Bluetooth es una comunicación inalámbrica estándar que permite transmisión de datos vía radio frecuencia en la banda de 2,4 GHz. Hay muchos módulos de Bluetooth para su uso en nuestros proyectos de electrónica, pero los más comunes son los módulos de JY-MCU porque son baratas y fáciles de encontrar en el mercado. Son pequeños y con un muy bajo consumo que permite añadir funcionalidad Bluetooth a nuestros módulos Arduino. Estos módulos que contiene el chip con una placa de desarrollo con los pernos necesarios para la comunicación serial.
Hay dos modelos de módulos Bluetooth: HC-05 que se puede master / slave (maestro / esclavo), y HC-06 sólo puede actuar como un esclavo (slave). La diferencia entre maestro y esclavo es que un esclavo es el dispositivo que está conectado al módulo, en el modo principal es el módulo que se conecta a un dispositivo.
Físicamente, los dos módulos son muy parecidos, sólo varían algunas conexiones. Nos encontramos con los pernos que son:
-VCC: Potencia del módulo entre 3.6V y 6V.
-GND: La masa del módulo.
-TXD: Transmisión de datos.
-RXD: Recepción de datos a una tensión de 3.3V.
-KEY: Poner a nivel alto para entrar en modo de configuración del módulo (sólo el modelo HC-05)
-Estado: Para conectar un LED para mostrar el resultado cuando los datos se comunican.
EN los comandos
Comandos AT son un tipo de comandos para configurar el módulo Bluetooth por medio de un microcontrolador, una computadora o cualquier dispositivo que tenga una comunicación serie (Tx / Rx). Son instrucciones que nos permiten cambiar la velocidad del módulo PIN, nombre, etc.. Para utilizar el módulo de Bluetooth comando no debe conectarse a cualquier dispositivo (módulo intermitente de LED rojo). Según las especificaciones del módulo, teniendo a respetar entre el envío de un comando AT y uno tiene que ser 1 segundo. Si se envía un comando AT y en menos de un segundo uno es enviado, el módulo no devuelve ninguna respuesta.
Materiales:

- Arduino Mini Pro
- Bluetooth HC-05
- MPU6050 giroscopio
- Botón
- Interruptor
- Batería de 3.7V-900mA
Esquema:
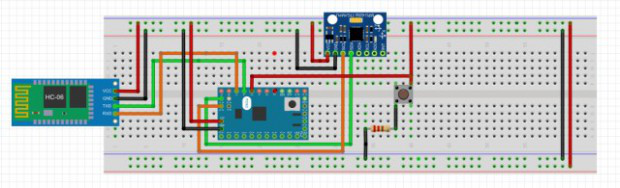
Construcción:
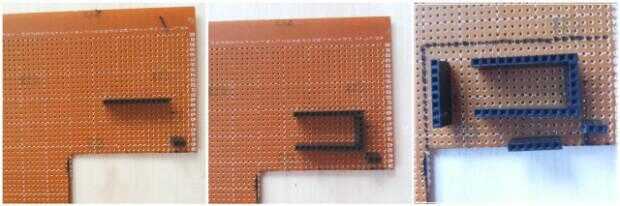
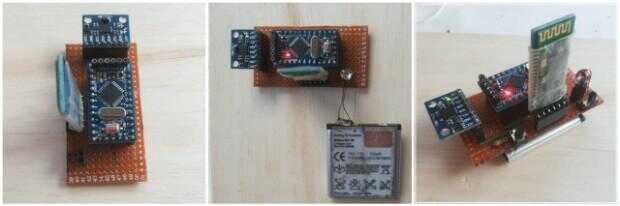
El giróscopo debe ser la más centrada posible para que cuando esté programada no arranca por defecto con errores, la función del botón es permitir datos este giroscopio de fundición son enviados por bluetooth, me ayuda a servos encontradas el robot se activa sólo donde se presiona el botón para que puedo guardar un mínimo de energía.
Algunas pruebas:
Error en las medidas
Son todos de interferencias que afectan los dispositivos electrónicos. El acelerómetro puede medir cualquier ángulo, pero sus lecturas son ruidosas y tienen un cierto margen de error.
Si desea dibujar un gráfico de las mediciones de un acelerómetro con el tiempo, verás algo como esto:
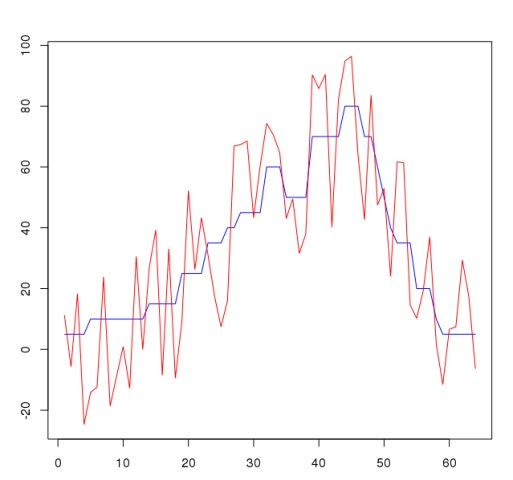
El ángulo real de inclinación (ideal) está marcado en azul, y las mediciones reales son en rojo. Puedo decir que no cumple a la letra la definición de "necesidad". Para corregir estos errores vamos a utilizar el filtro, denominado filtro suplementario. Es ideal para implementar Arduino: proceso fácil de usar, bajo costo y con muy buena precisión.
Anexo código de aplicación del filtro complementario en el manejo de tres servos, ideal si usted necesita para manejar un brazo robótico.









")
![Arduino voz / reconocimiento de voz con el módulo de Geeetech [Tutorial]](https://foto.askix.com/thumb/170x110/4/df/4df7db768df778afe854216d5d48b13d.jpg "Arduino voz / reconocimiento de voz con el módulo de Geeetech [Tutorial]")


