Paso 1: La mecánica


Los motores que utiliza para este robot son 2 servomotores modificados para la velocidad. También se puede utilizar otro motor si ' s lo suficientemente bueno... No tengo ninguna por lo Nintendo 2 servomotores.
Cómo a servomotores el MOD (mirar las fotos)
1. Retire los cuatro tornillos de los servos y lo desarma todo.
2. quitar la electrónica manteniendo sólo los cables del motor (seguí los otros 3 cables desde el potenciómetro pero no tienes que).
3. trata de encajar los engranajes excepto uno. Pegué el gran engranaje al que debajo de ella para ser alta enogh "salir" del caso. No es exactamente una regla de cómo hacerlo... varios servos tendrá varias Artes por lo que tendrá que probar hasta que encuentre la mejor "combinación".
4. poner todo junto.
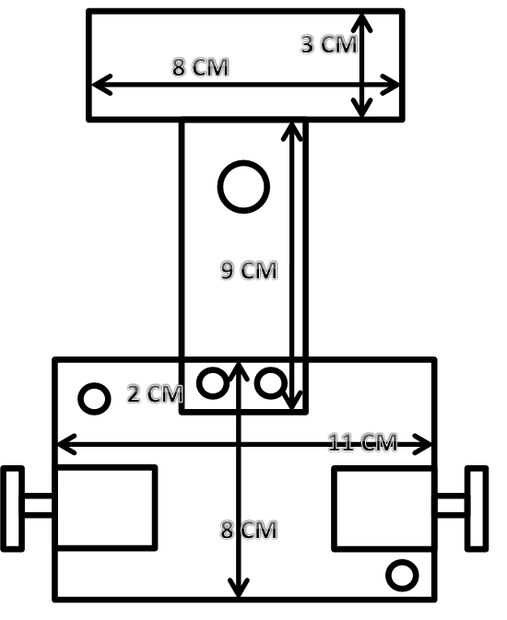
El cuerpo (mirar la imagen):La base del robot se hace de PCB cortada para el tamaño correctamente.
Usted también necesitará 5 tornillos:
-2 para unir el frente y la base del robot
-uno de los sensores de elevación del suelo (que puede hacer algo más, si tienes)
-2 para levantar y fijar el microcontrolador PCB
")












