Paso 1: trabajo
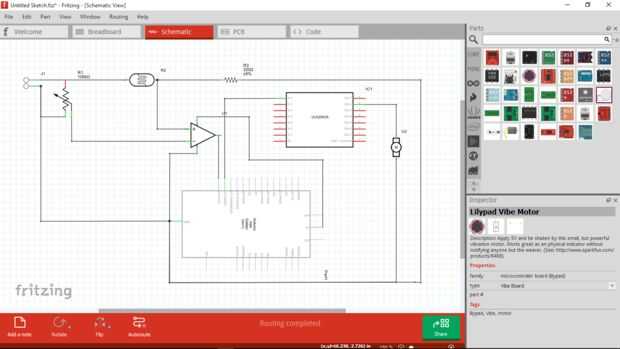
El proyecto es para el control de un robot usando Intel Galileo que toma una señal de un resistor dependiente de luz (ldr).
Alimentación se alimenta a la ldr, cuando la luminosidad aumenta corriente pasa a través de la ldr para el Op Amp, entonces a la
Tablero de Galileo, se envía una señal después de la Junta para el transistor que enciende el motor, el motor gira a su vez las ruedas del robot así conducirlo.
La velocidad del robot depende de la cantidad de luz en el ldr, cuando la luz se reduce, el robot se frena y se detiene.










")
 Básicos Arduino Robot buscador de luz!")
