Paso 1: El algoritmo
El algoritmo básico utilizado es el:
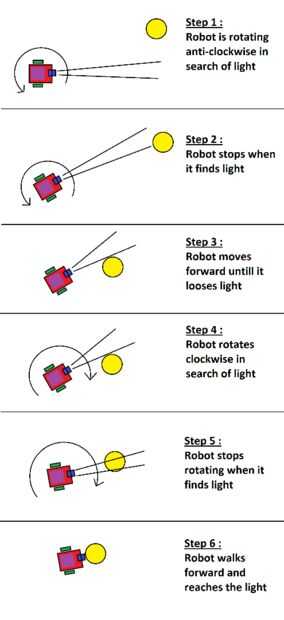
Paso 1: gire hasta que el LDR detecta luz.
Paso 2: mientras la LDR es sensor de luz moverse hacia adelante.
Paso 3: Si el LDR pierde la luz, gire el robot en la dirección opuesta hasta que el LDR detecta luz
Paso 4: Repita el paso 2 y 3 para siempre
la base del algoritmo es que mientras el robot está girando, si se encuentra una fuente de luz, nos mando el robot para detener. Ahora debido a la diferencia de tiempo entre la detección de la luz y el robot a resto (fracción de segundos), el robot va un poco de alineado de la fuente de luz. por lo tanto, la próxima vez después de que el robot pierde la fuente de luz mientras se mueve hacia adelante, el robot se hace girar en la dirección opuesta.
He añadido algunas cosas extras en el algoritmo para hacer robot funcione más suave, pero el algoritmo básico permanece inalterado.





")






 Básicos Arduino Robot buscador de luz!")