Paso 1: Protector de Motor y motores
Pasaremos por el motor paso rápidamente, así que si le va ayudar, aquí está el tutorial este paso estará basado apagado de: Tutorial de protector de Motor. Utilizaremos el mismo escudo del motor y el mismo código en nuestro proyecto, así que puede ser útil tener una breve introducción a lo que nos va a hacer en este paso.
Configuración de los motores
Para empezar, utilizamos motores de baja tensión con cinta en el extremo de cada eje para comprobar si nuestro código estaba trabajando o no. Al principio, es más importante que un prototipo de trabajo, que puede ampliarse a obtener un producto final. Los motores que utilizamos en este paso no eran los motores finales que hemos utilizado, pero trabajó la misma y nos permitió trabajar en el proyecto hasta que pudimos encontrar motores que mejor se adapta a nuestras necesidades.
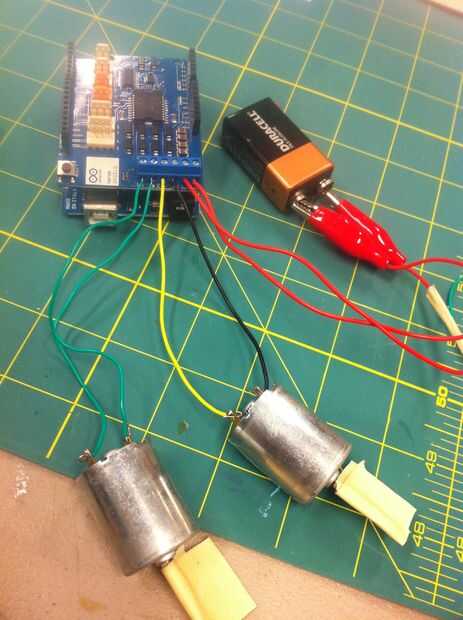
Fije el alambre en las ranuras del canal A y canal B en el escudo del motor y los extremos de los motores. No tienes que soldar estos, sin embargo, será más fácil si sólo enrosca alrededor de las fichas positivas y negativas para pasos de fácil eliminación en el futuro.
Código
/*
void setup(void) {}
Serial.Begin(9600);
pinMode (12, salida); A pin inicia canal de Motor
pinMode (9, salida); A pin inicia canal de freno
pinMode (13, salida); Clavija de iniciados Motor canal de B
pinMode (8, salida); Pin de B inicia canal de freno
digitalWrite (13, bajo); Establece la dirección de avance de canal A
digitalWrite (8, bajo); Soltar el freno para el canal A
digitalWrite (12, bajo); Establece la dirección de avance de canal B
digitalWrite (9, bajo); Soltar el freno para el canal B
}
void loop(void) {}
analogWrite (3, 125); Ajustar la velocidad para el canal A
analogWrite (11, 125); Velocidad de canal B
}
*/
Video de los motores de trabajo
Señales de
Recuerde que cuando utilice el protector de motor en el futuro medidas que los motores toman análogo de 0 y 1 analógica para el envío de información hacia el escudo del motor, por lo que no podemos utilizarlos. La dirección de los motores también depende de cómo cada uno de los cables de canal están conectados al motor. Si un motor está girando en la dirección equivocada, o bien cambiar la dirección en el código cambiando el Digital salida 13 o 12 para canales A y B, respectivamente. O se puede cambiar cómo se unen los cables de canal a los separadores motor, invirtiendo el sentido de la corriente y la dirección de los motores.













