Paso 2: Célula fotoeléctrica sensores
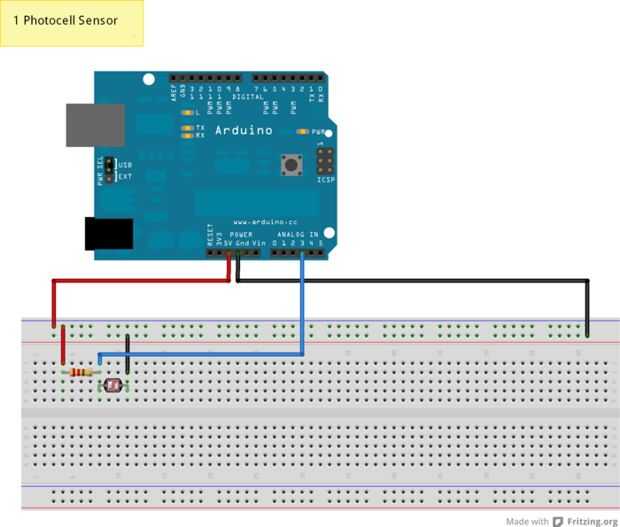
Vamos a estar pasando por este paso de fotocélula bastante rápidamente, así que si usted necesita más información o detalles, mira aquí: Tutorial de fotocélula, es un instructivo para la creación de un sensor de la fotocélula simple. Estaremos usando la misma configuración y código similar en nuestro proyecto.
Por qué necesitamos sensores
En este paso que será configurar tres sensores fotocélula, todo esto será necesario para completar la serpiente. Dos de estos sensores se convertirá en sensores direccionales, control de los motores. La luz más tendrá el sensor derecho o izquierdo de control recibirá la cantidad de energía cada uno de los motores, controlando la velocidad y dirección del movimiento de la serpiente. El último sensor será el sensor de luz ambiental, detectando cuanta luz está en la habitación. Esto es necesario para cada uno de los sensores direccionales por lo que puede decir cuánto más luz está siendo dirigida en ellos; y es necesario para los leds, si la habitación es oscura, las luces se encenderán.
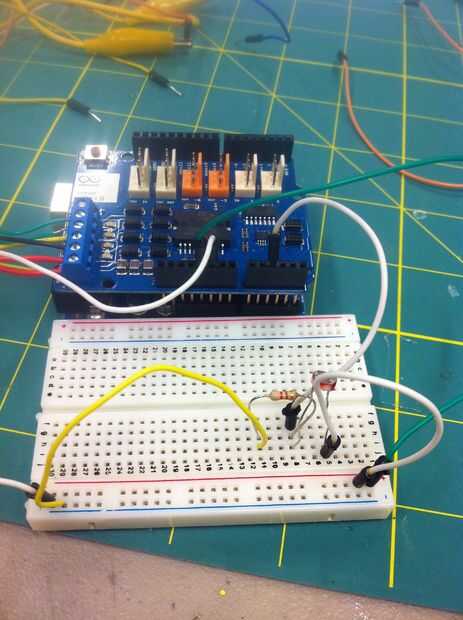
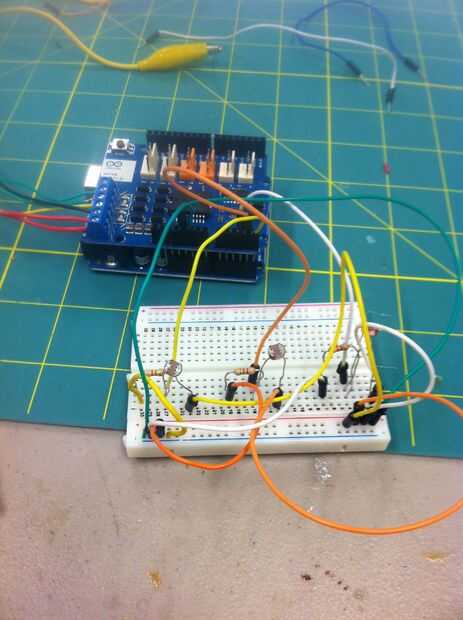
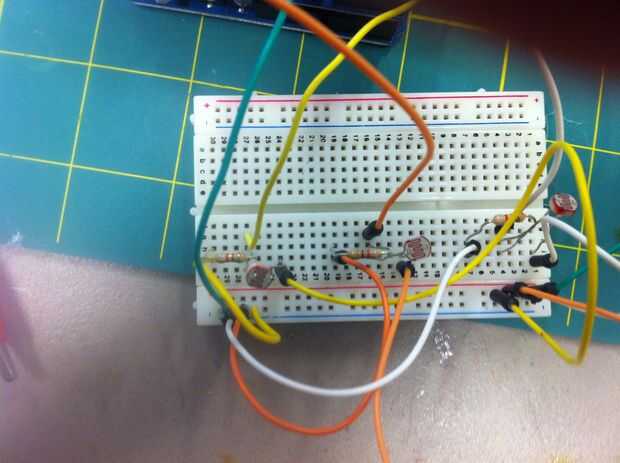
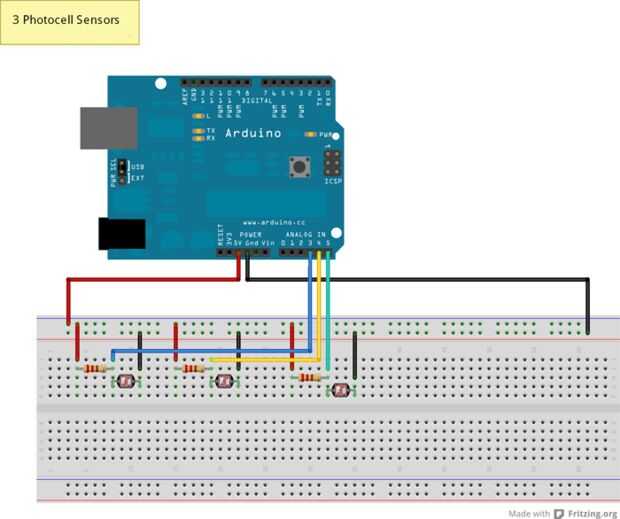
Establecer el circuito
Se utilizó una configuración similar como el ejemplo de instructivo para nuestros sensores de fotocelda. Cuando un sensor, es exactamente el mismo. Sólo asegúrese de que los pines analógicos se colocan en los pernos 2-5, como los motores a usar 0 y 1 (aunque no estén enchufados en ellos). Hemos utilizado pernos analógicos de 3, 4 y 5. Donde 3 y 4 son los sensores direccionales y 5 es el sensor de ambiente.
Al instalar múltiples sensores, use el mismo ejemplo de circuito como la primera. Cada sensor debe tener su propia línea de alimentación y tierra y no puede ser una parte del mismo circuito; Esto facilitará acabado la serpiente en pasos futuros. También, asegúrese de que sus resistencias son iguales, puesto que esto afecta las lecturas analógicas, necesitamos todos los sensores para leer valores similares.
Código
/*
int photocellReading3; el análogo del divisor de resistencia análoga
int photocellReading4; el análogo del divisor de resistencia análoga
int photocellReading5; el análogo del divisor de resistencia análoga
void setup(void) {}
Serial.Begin(9600);
}
void loop(void) {}
photocellReading3 = analogRead(3); base luz lectura
Serial.Print ("analógica lectura 3 =");
Serial.println(photocellReading3); la lectura analógica cruda
photocellReading4 = analogRead(4); irá a motor 1
Serial.Print ("analógica lectura 4 =");
Serial.println(photocellReading4); la lectura analógica cruda
photocellReading5 = analogRead(5); irá a motor 2
Serial.Print ("analógica lectura 5 =");
Serial.println(photocellReading5); la lectura analógica cruda
Serial.println("");
Delay(1000);
}
*/
Una vez más, el código es similar a la fotocélula instructable. Creamos las variables photocellReading para almacenar las lecturas analógicas de los pernos y luego iniciar el lazo principal. Se establece la variable en la lectura analógica e imprimirlo para ver si está funcionando. Damos una pausa de 1 segundo, o bien la lectura mostrará tan rápido que podremos leerlos.
Jugar con sensores. Brillar una linterna en ellos para hacer la espiga de las lecturas, se deben cubrir para hacer las lecturas de la gota. Sus lecturas pueden tener diferentes valores que el nuestro, está bien. Cada sensor es diferente y depende de la luz ambiente en la sala en el momento.
En el siguiente paso utilizaremos estos valores para el control de los motores.













