Paso 7: Lo que todo parece juntos
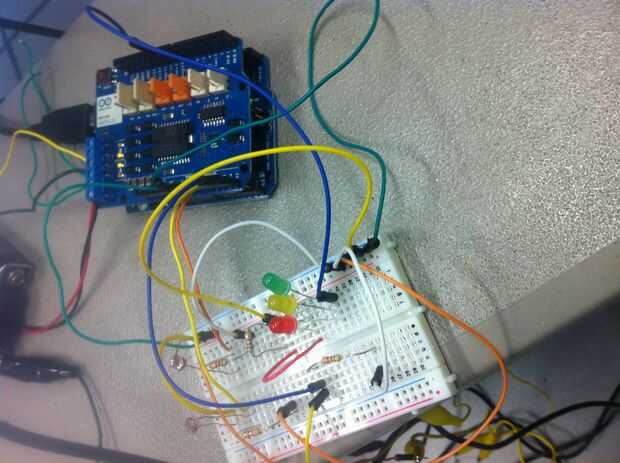
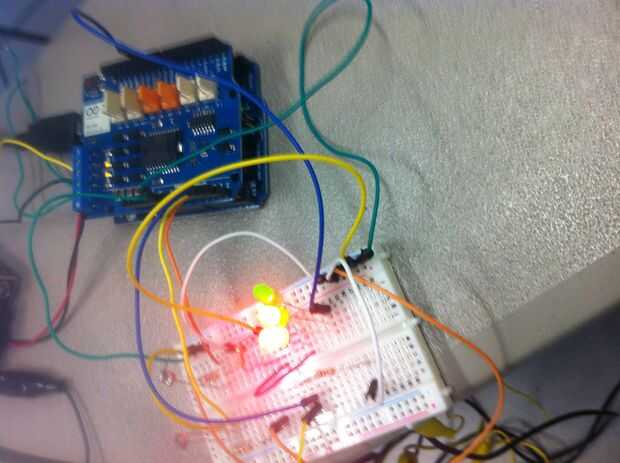
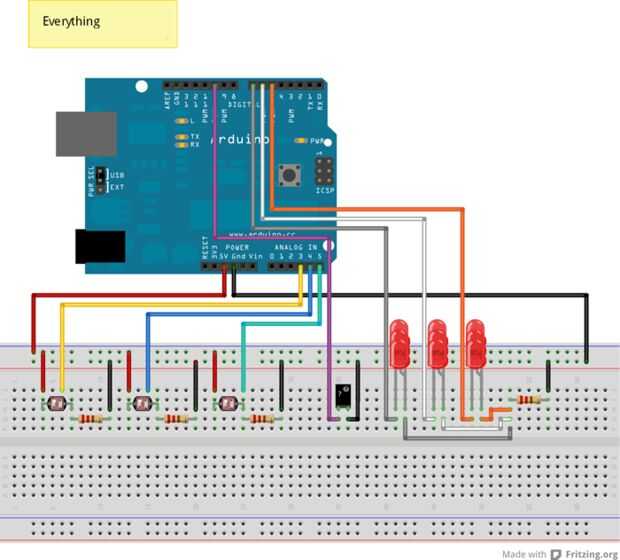
Este paso es no agregar nada nuevo a arduino, pero marca el final de la parte eléctrica del proyecto y comienza la porción de los materiales. De aquí encendido hacia fuera, todas las piezas por separado mencionamos en los pasos anteriores deben ser traídos juntos y comienza a crear un proyecto coherente. Damos una imagen de todo lo que hemos añadido a la instalación de arduino y protoboard. También tenemos el código final que vamos a usar para el control de la serpiente de aquí encendido hacia fuera.
Código final
/*
int photocellReading3; el análogo del divisor de resistencia análoga
int photocellReading4; el análogo del divisor de resistencia análoga
int photocellReading5; el análogo del divisor de resistencia análoga
int photocellDifference1;
int photocellDifference2;
int lrValue;
int contador = 1;
void setup(void) {}
Serial.Begin(9600);
// ///////////////// //
Configurar motores / /
// ///////////////// //
pinMode (12, salida); A pin inicia canal de Motor
pinMode (9, salida); A pin inicia canal de freno
pinMode (13, salida); Clavija de iniciados Motor canal de B
pinMode (8, salida); Pin de B inicia canal de freno
digitalWrite (13, bajo); Establece la dirección de avance de canal A
digitalWrite (8, bajo); Soltar el freno para el canal A
digitalWrite (12, bajo); Establece la dirección de avance de canal B
digitalWrite (9, bajo); Soltar el freno para el canal B
// /////////////////// //
Configurar todos los LEDs / /
// /////////////////// //
pinMode (7, salida); Inicializa el pin 7 para LED Grupo 1
pinMode (6, salida); Inicializa el pin 6 para LED Grupo 2
pinMode (5, salida); Inicializa el pin 5 LED Grupo 3
// ////////////////////////// //
Configurar el motor de la vibración / /
// ////////////////////////// //
pinMode (10, salida); Inicializa el pin 10 del motor de vibración
}
void loop(void) {}
// /////////////////////////////// //
lecturas del sensor fotocélula / /
// /////////////////////////////// //
photocellReading3 = analogRead(3); irá al motor A
photocellReading4 = analogRead(4); irá a motor B
photocellReading5 = analogRead(5); base luz lectura
obtener diferencias entre los sensores de los motores y sensor de luz ambiental
photocellDifference1 = (photocellReading3 - photocellReading5);
photocellDifference2 = (photocellReading4 - photocellReading5);
lrValue = photocellDifference2 - photocellDifference1;
// /////////////////////////////////// //
encender motores basados en sensores / /
// /////////////////////////////////// //
Si (lrValue < = -120) {}
analogWrite (11, 255);
analogWrite (3, 100);
} else if (lrValue < = -90) {}
analogWrite (11, 224);
analogWrite (3, 100);
} else if (lrValue < = -60) {}
analogWrite (11, 193);
analogWrite (3, 100);
} else if (lrValue < = -40) {}
analogWrite (11, 162);
analogWrite (3, 100);
} else if (lrValue < = -25) {}
analogWrite (11, 131);
analogWrite (3, 100);
} else if (lrValue < 25) {}
analogWrite (11, 100);
analogWrite (3, 100);
} else if (lrValue < 40) {}
analogWrite (11, 100);
analogWrite (3, 131);
} else if (lrValue < 60) {}
analogWrite (11, 100);
analogWrite (3, 162);
} else if (lrValue < 90) {}
analogWrite (11, 100);
analogWrite (3, 193);
} else if (lrValue < 120) {}
analogWrite (11, 100);
analogWrite (3, 224);
} else {}
analogWrite (11, 100);
analogWrite (3, 255);
}
// //////////////// //
LEDs Grupo 1 / /
// ///////////// // //
Si (((timer-1) % 4) == 1)
digitalWrite (7, alto); encender LED
otra cosa
digitalWrite (7, bajo); sistema LED apagado
// //////////////// //
LEDs grupo 2 / /
// ///////////// // //
Si ((((timer-3) % 4) == 2) || (((timer-3) % 4) == 1))
digitalWrite (6, alto); encender LED
otra cosa
digitalWrite (6, bajo); sistema LED apagado
// //////////////// //
LEDs grupo 3 / /
// ///////////// // //
Si ((((timer-2) % 3) == 1) || (((timer-2) % 3) == 2))
digitalWrite (5, alto); encender LED
otra cosa
digitalWrite (5, bajo); sistema LED apagado
// ///////////////// //
motor vibrador / /
// ///////////////// //
Si (((timer % 16) == 1) || ((TIMER % 15) == 2) || ((TIMER % 15) == 3))
digitalWrite (10, HIGH); motor de la vibración de conjunto en
otra cosa
digitalWrite (10, bajo); partió el motor de la vibración
restablecer el temporizador de cada 12 segundos
Si (contador == 48)
contador = 1;
otra cosa
contador ++;
retardo por 0,25 segundos
Delay(250);
}
*/













