Paso 3: electrónica
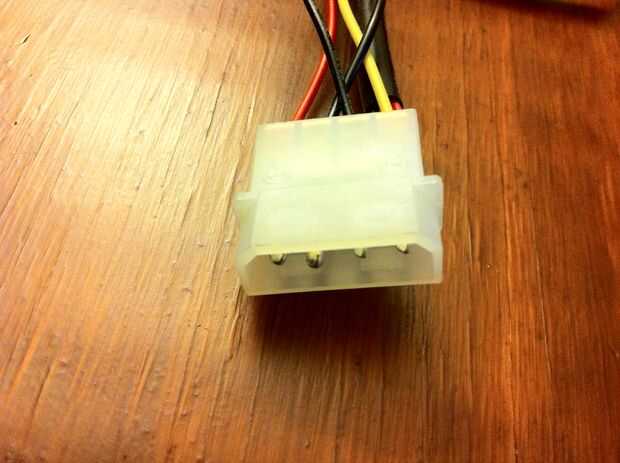


En el corazón de la electrónica es la fuente de alimentación ATX. Vamos a usar dos tensiones de esta fuente de alimentación: 5V y 12V. Un estándar ATX tiene varios conectores molex (generalmente los conectores de 4 pines blanquecinos) que tienen el 12V (amarillo) y alimenta de 5V (rojo). La alimentación de 12V se usa para alimentar el Arduino y la bola principal lanzar motores, y la alimentación de 5V se utiliza para alimentar los servos. Una nota sobre que fuente de alimentación ATX para alimentar realmente en: computadoras Dile la fuente de alimentación para funcionar conectando el cable verde en la gran 20(or 24) pines a tierra - usted puede hacer lo mismo con un clip por tender un puente sobre el cable verde con un cable negro.
Microcontrolador
En este momento estoy utilizando un Arduino Mega 2560 para controlar el robot, pero tengo planes al puerto que sobre un Teensy 2.0 ya que es considerablemente más barato, tiene una huella más pequeña, y puedo seguir usando el IDE de Arduino.
Servos
Hay cinco servos usados en este robot. Dos servos de alto torque se utilizan para la alimentación/vertical bola de posicionamiento, y tres servos moderadamente apretados se utilizan para la agitación de posicionamiento/bola de rotación/horizontal. El servo para la agitación de la bola tiene que ser modificado para un servo de rotación continua: http://www.acroname.com/robotics/info/ideas/continuous/continuous.html alternativamente, usted puede apenas comprar un servo que ya es de rotación continua (como una paralaje 900-00008), pero cuestan un poco más.
Motores
Los motores que elegí son los motores sin escobillas outrunner hexTronik DT700. Fui con motores brushless debido a requisitos de longevidad, y como un bono de estos son más silenciosos y más eficientes que motores más cepillados. Los controladores de velocidad HobbyKing SS serie 25-30A brushless ESC y controlables a través de la biblioteca estándar de servo Arduino. Por último, puesto que estos controladores de velocidad no son reversibles, tengo dos relés DPDT (TE RTE24005F de conectividad) para neutralizar los motores de giro excelente :-)
Varios
Estos artículos son bueno tener, pero no es estrictamente necesaria para conseguir que un robot bola flingin' :-) La pantalla LCD es un personaje de 16 x 2 estándar que se utiliza bien en la comunidad de Arduino. La tarjeta SD está bien estandarizada, y elegí un módulo ya ensamblado por lo que no necesito comprar ninguna adicional resistencias/soportes, etc.. El sensor de infrarrojos es ideal para controlar el robot de forma remota con una TV estándar remoto - usted no necesita programar, sólo presione los tres botones cuando el robot se enciende lo dejó saber lo que usted desea utilizar para arriba/abajo/entrar! Finalmente, el PCB personalizado no es realmente necesario, pero seguro que facilita la Asamblea!
¡ Construcción!
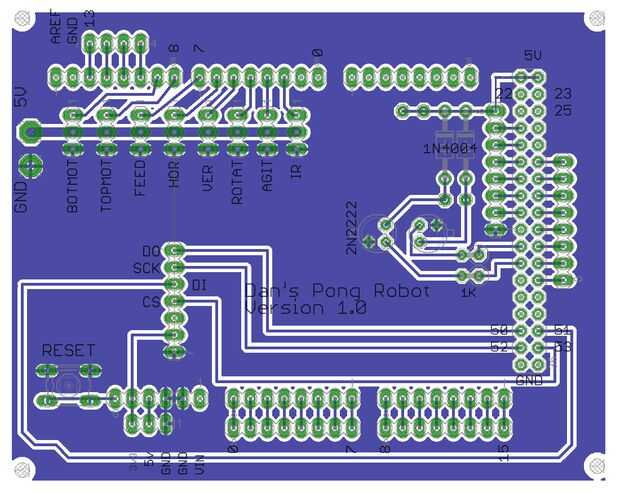
La mayoría de aquí el esfuerzo es al conectar los dispositivos Arduino para la operación, por lo que es más fácil mostrar la disposición que generé en CADSoft Eagle. También he adjuntado el archivo de proyecto de águila si desea hacerte la Junta y obtener más aclaraciones en donde se conectan las cosas. Las áreas grandes de color azul son planos de tierra. Otra vez, me gustaría señalar que esto es para el Arduino Mega 2560 y eventualmente esto modificará la Teensy 2.0. En cuanto a otras conexiones que es necesario no se muestran aquí:
1) 12V salida de alimentación va a entrada de alimentación de Arduino (utilicé un enchufe de Radio Shack) y a los controladores de velocidad.
2) salida 5V de alimentación va a 5V de entrada a bordo (para uso del servo). Es importante que usted trate de usar Arduino 5V de salida para alimentar los servos como no puede manejar la carga que requerirán de los servos.
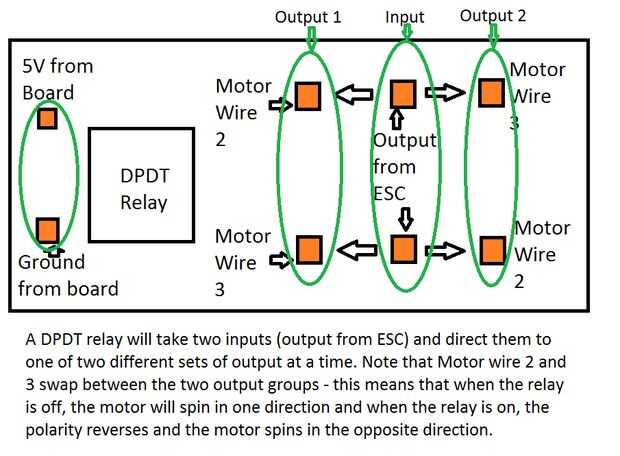
3) motores y controladores de velocidad tienen tres cables. Uno de los cables del regulador de velocidad va directamente al motor. Los otros dos van a la entrada para el Relais - lo hacemos así podemos invertir la dirección del motor. Ver imagen de abajo para obtener más información. Controlamos el relé con el circuito que se muestra en el tablero (ver aquí) - 5V a lo largo de la parte superior de la Junta cerca del 1N4004 va a la entrada del relé y los dos agujeros vacíos debajo el 1N4004 ir a la tierra del relé. Hay dos motores, así que tenemos dos relés y dos circuitos de control (tenga en cuenta los dos transistores/resistencias/diodos en la placa). Para obtener más información sobre relés DPDT, lea el artículo de Wikipedia para un montón de información :-)
4) la pantalla de LCD que he usado fue el mismo que se utiliza por Adafruit. Un potenciómetro es necesaria para ajustar el contraste de este modelo en particular, pero coloqué cerca de la pantalla LCD, así que sólo necesitaba 8 cables (Cableado CAT5 ethernet) para conectar el Arduino a la pantalla LCD.
5) el módulo de la tarjeta SD que ya tenían resistencias en su lugar, y usted puede incluso utilizar un módulo MicroSD si lo desea. Sin embargo, si usted tiene una ranura para SD llano viejo que desea utilizar, por favor asegúrese de utilizar el correcto cableado/circuito evitar daños en la tarjeta SD!




 con una prensa de bricolaje bat")





")


