Paso 4: Paso 4: conexiones de Hardware (Pi y escudo de puente) para conseguir que el robot ya está en marcha:



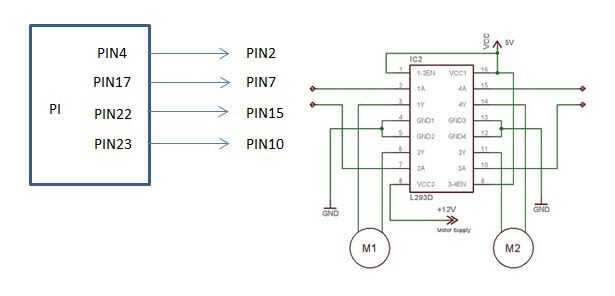

Hemos utilizado el controlador de motor de escudo de puente para conectar a la frambuesa pi en lugar de un controlador de motor separado. Si usted tiene un tablero separado o ha hecho una puede usar números pin 4,17,22,23 desde la cabecera GPIO frambuesa pi para conectar al motor números de pin de controlador 2,7,15,10. Estas conexiones tienen que ser como se muestra en foto
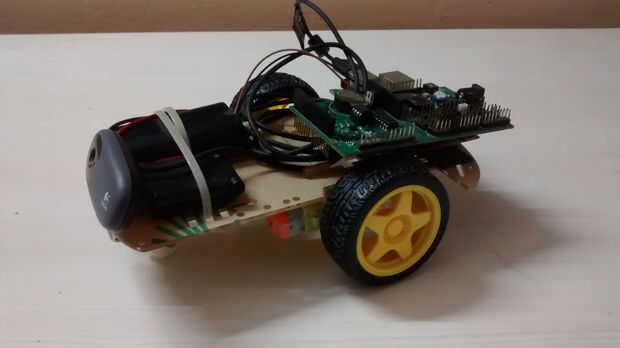
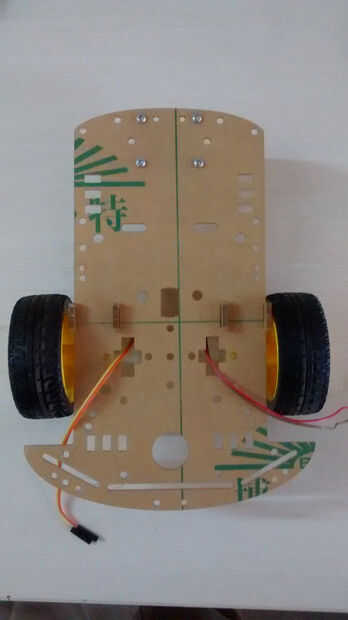
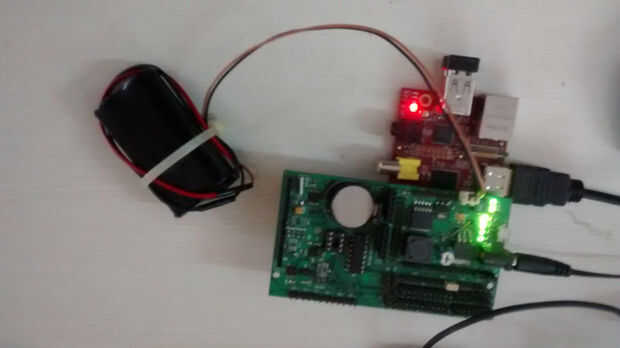
Finalmente, todos estos tienen que ser montados en un chasis del robot (ver imagen para ayudarle a organizar las piezas). Colocar el dongle wifi en la ranura señalada. Fijar el puente protector de la Pi y conectar la batería de ion de litio de dos células con el escudo de puente y su compañero mecánico está listo para rodar!












