Cómo construí el notswatbot
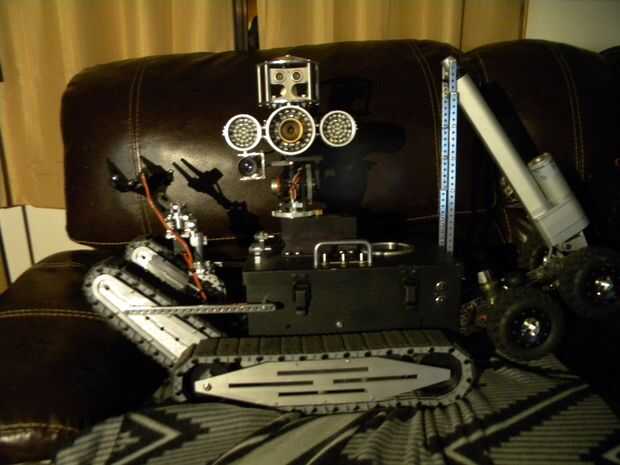
Empecé con un recinto de excedentes militares, lijado y había pintado con acabado de arruga de krylon. Costumbre montar el sistema de pista de piezas en Ebay, algunas pistas de lynxmotion. (ejes tuvieron que ser perforado para coincidir con ejes de actobotics. y acopladores de actobotics utilizados para línea de rodamientos y ejes y colocar las pistas hacia adelante. Usé algunos motorreductores planetarios con el par correcto y velocidad (trató de varios motores de diversas calificaciones y se establecieron en estos) 82 rpm, motores del mundo, del tipo usado para cambiar de puesto una transmisión en 4 x 4, no las más tranquilas, pero un montón de energía de sobra. Construí el brazo robótico con una caja de servo para la elevación y un bloque de servo para girar a la pinza paralela, todo desde la ciudad de servo. Las ruedas estaban montadas en la parte posterior para evitar que se vuelque hacia atrás al subir escaleras y un motorreductor de pittman con servos engranajes cónicos de la ciudad y le da de piñones de cadena es un toque extra de poder subir ya que había muy poca superficie de las pistas agarrar cuando inicialmente a partir de la subida. Añade la caja de cambios de montaje inferior con sistema de inclinación de spt 400 (actualizado el servo a un hs7955tg de hitec para manejar el peso adicional de la cabeza de cámara)
La cámara tiene tres cámaras, incluyendo un prólogo frente a Junta cámara con matriz de led ir para visión nocturna, un retrovisor y un hd zoom de la cámara con un conmutador de cámara rc y en la pantalla Mostrar módulo Mostrar tiempo y batería voltaje de funcionamiento. la señal de vídeo se transmite a la posición de los operadores con un transmisor de largo alcance de Hobby King. Actualmente está siendo operado con un radioenlace AT9 y spektrum DX6 transmisor, ejecutando un controlador de 30a Roboclaw como no he terminado de montar/programación del transmisor xbee/arduino. Pero yo no podía esperar más para probarlo. :)














