Paso 5: Configurar la pre autónoma
* Haga clic en la imagen para ampliar *
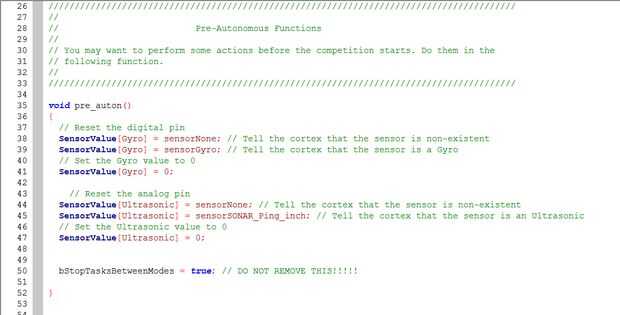
Configuración/restablecimiento de sensores:
Cuando programación autónoma, quiere ser tan preciso como sea posible y para ello, añadir que unos sensores ayudará mucho! Programación de estos sensores puede ser difícil, pero estableciendo, es extremadamente sencillo! Una vez que setup configuración de Sensor y el sensor en el Motor, no hay mucho que tienes que hacer para configurarlos:
Puesta en funcionamiento de un giroscopio:
1. Asegúrese de que lo que vas a escribir es en el bucle de la autónomo
3. Escriba lo siguiente:
Agregue el nombre de su giroscopio entre el "[]". ¡ No olviden el punto y coma!
4. Escriba lo siguiente:
Agregue el nombre de su giroscopio entre el "[]". ¡ No olviden el punto y coma!
5. Escriba lo siguiente:
Agregue el nombre de su giroscopio entre el "[]". ¡ No olviden el punto y coma!
En estas 3 líneas de código, "SensorValue", es la manera de contar el sensor lo que desea el valor de ser. Ajuste del sensor como "sensorNone" dice la corteza que el sensor no existe, entonces se dice que el sensor es "sensorGyro", dice la corteza que el sensor es en realidad un giroscopio. Esto sólo ha reprogramado el giroscopio! Cuando se ajuste el sensor como "0", dicen el giroscopio que el grado actual es "0", así que cuando quieras que gire 90 grados, el valor es exacto.
Configuración de otros sensores:
Configurar otros sensores es lo mismo que la creación de un giro, sin embargo, en lugar de "sensorGyro", va a ser el sensor que usted eligió. Aquí está algunos sensor comandos de reset para los siguientes:
Ultrasónico (pulgadas):
Potenciómetro:
QuadEncoder I2C:
Neumática:
Si hay cualquier sensor que echaba de menos que usted necesita, los foros de RobotC son una excelente fuente, pero esto es bastante autoexplicativo.













