Paso 13: Programar tu robot en BASIC
10 PRINT "HOLA MUNDO"
20 GOTO 10
Ahora, tu robot puede ser programado en BASIC! (y sí, el programa anterior funciona también)
Aquí están unos pocos comandos básicos específicos para el control de tu robot!
Adelante {ciclos de} (Se mueve el robot hacia adelante # ciclos de bobina: ejemplo adelante 512)
Atrás {ciclos de} (Se mueve el robot hacia atrás # bobina ciclos: ejemplo 512 hacia atrás)
Derecho {ciclos} (Se mueve sólo la derecha paso a paso adelante # bobina ciclos)
Izquierda {ciclos de} (Se mueve sólo la izquierda paso a paso adelante # bobina ciclos)
HCSR04 (contiene la gama actual del sensor de HCSR04)
Hay toda una lista de otros comandos básicos que aceptará tu robot incluido en el archivo.
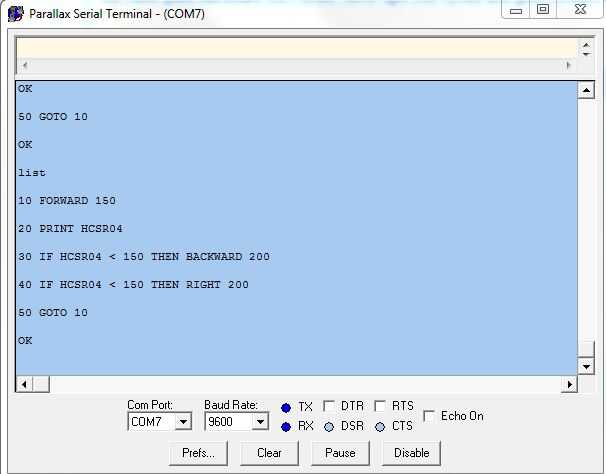
Probar el siguiente programa básico para crear un programa de evitación del obstáculo simple en BASIC.
10 150 DELANTERO
HCSR04 DE IMPRESIÓN 20
30 IF HCSR04 < 150 200 luego hacia atrás
30 IF HCSR04 < 150 luego a la derecha 250
40 GOTO 10
Este programa es un simple bucle que se mueve el robot hacia adelante 150 ciclos, comprueba si hay un obstáculo si se encuentra un obstáculo, entonces el robot va hacia atrás 200 ciclos, gira derecha 250 ciclos y se pone en marcha otra vez.
Aquí hay algunas ideas adicionales:
1) añadir un LED o un pequeño Altavoz y use el comando OUTA en BASIC para encender un LED o hacer un sonido cuando se mueve o la detección de un objeto.
2) cambiar tu robot a un solicitante de obstáculo por encontrar un objeto, va hacia ella y la parada delante de ella.
3) visitar los foros de Propellerpowered y compartir tu robot ideas de programación. http://forums.propellerpowered.com




 robótica con Cortex M3 (Brasil Open Hardware)")



 (impresión 3D)")
 con real robótica, luces y sonido y 36.000 mAh de potencia!!")


