Paso 8: Opciones de pantalla (tablero)

Lo que enchufe en la parte superior de tu robot se determina por su estilo personal y presupuesto.
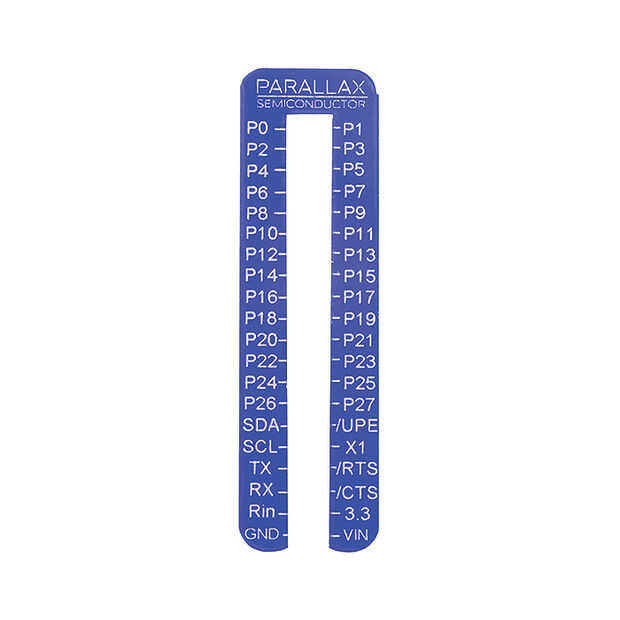
Si utilizas una breadboard simple como yo lo hice en el ultimo paso, usted podría simplemente puente los cables directamente de la cabeza de 40pin de la Junta de inicio rápido a la protoboard, entonces en sus dispositivos. Yo he conectado un "Pin Finder" (Foto 2), de paralaje o Propellerpowered que le ayudará en la comprensión de la distribución de I/O del conector. Simplemente deslice el plástico buscador de Pin en el conector hasta que encaje en su lugar.
Una versión imprimible de la Pin Finder también puede ser encontrado aquí:
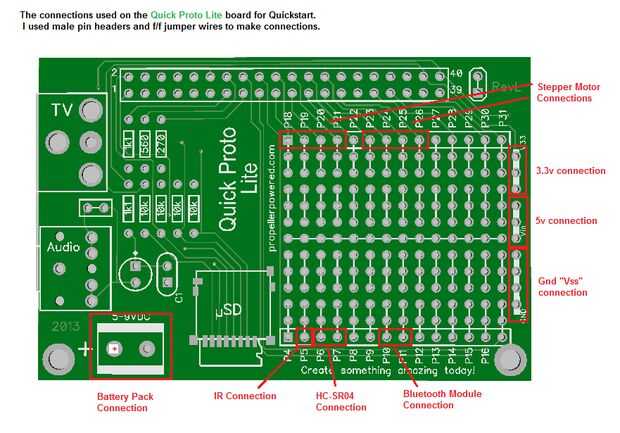
El tablero verde a la derecha del inicio rápido es la "Rápida Proto Lite". Tiene conexiones para TV y Audio que probablemente no utilizarás para un robot, pero también tiene la capacidad de tu inicio rápido de la energía y tener una toma microSD añadida. (En el momento de la redacción de este documento, la junta rápida Proto Lite se ofrece gratis con la compra de un inicio rápido de Propellerpowered.com lo que es un buen negocio.) P8X32A Inicio rápido PCB fotografiado directamente abajo el Quickstart es también una opción económica que cuesta sólo $4,99 de Propellerpowered y paralaje que requieren en un encabezado de 40pin macho (fotografiado) para adaptarse a la rápida) Finalmente, en la parte inferior derecha es el Propellerpowered "Servo & More" del tablero que se también se puede configurar para el inicio rápido con mucha área de prototipado para tu robot.
La parte importante es ese poder el inicio rápido, proporcionando energía para el resto de la robusteza y tener acceso a una porción de i/os de la hélice. (En mis ejemplos, va a utilizar el tablero "Rápida Proto Lite" que viene con el inicio rápido de Propellerpowered. Ver tercera imagen para los puntos de conexión.) Desde aquí, te especifico las tensiones y esquemas en general términos que usted tendrá éxito sin importar qué configuración de tablero de hélice use.




 robótica con Cortex M3 (Brasil Open Hardware)")



 (impresión 3D)")
 con real robótica, luces y sonido y 36.000 mAh de potencia!!")


