

¿¡ Escabullen alrededor? Esto está basada en Arduino fácil construir versión del caminante insectos hechos con alambre de colgador de ropa y diseñado originalmente por Jérôme Demers (véase también este instructable) y Gareth Branwyn. Viene en dos versiones:
- un independiente, sólo Arduino versión, impulsado por un sketch de Arduino antiguo común, y
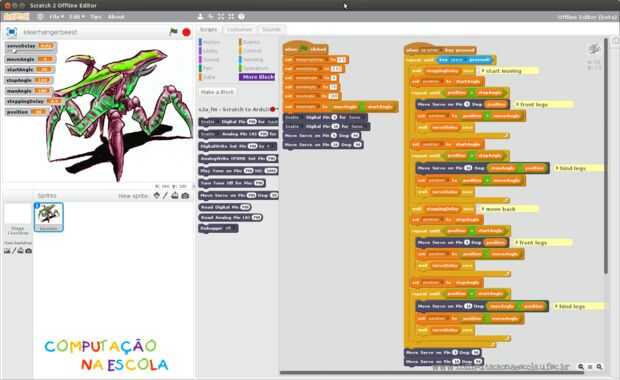
- una versión con mando a distancia, programada dinámicamente usando el lenguaje de programación visual desarrollado por el MIT Scratch .
Hemos desarrollado para las personas que han encontrado este diseño popular robot lindo pero quiere construir sin tener que soldar un circuito analógico de doble núcleo.
Se llamaba Kleerhangerbeest, que es holandés para "animal coat-hanger", en honor de la Strandbeests, robots impulsada por el viento de la playa del creador holandés Theo Jansen. La versión de Scratch fue desarrollada para permitir que niños incluso preadolescentes a programa sin esfuerzo. Tiene la ventaja adicional de que, al controlar el robot con el entorno de programación visual de cero en una PC o Raspberry Pi, es posible desarrollar programación Arduino multi-threaded y cambiar el programa a la carrera, sin necesidad de recompilar y cargar un programa basado en el firmware. Este enfoque simple de construir, junto con el cero basado en programación, hace especialmente interesante para la enseñanza de robótica a los niños, permitiendo a los niños a experimentar con modos distintos andares dinámicamente y explorar el comportamiento del robot mediante una fácil herramienta de programación que permite para ver inmediatamente los resultados de un cambio de programa.
Rediseñamos el andador de la percha tradicional como un robot walker bi motor todavía muy simple que utiliza un Arduino y dos servos de hobby. Proporciona un andar mucho más controlable que el modelo original basado en el núcleo de bi, pero es casi tan barato y mucho más fáciles de construir. Este proyecto es estructuralmente muy similar al Servo-base 4 patas de Walker de Phillip Torrone.
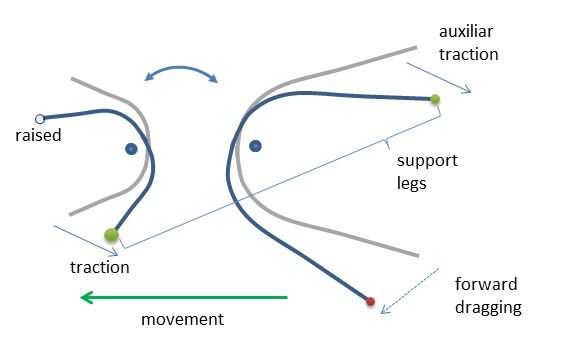
¿Cómo puede un robot de cuatro patas con dos conjuntos rígidos de piernas girando uno contra el otro a pie?
El gráfico arriba ilustra el principio de movimiento de cuatro-legged caminantes con dos conjuntos de pierna rígida. No parece ser una solución muy intuitiva, pero, de hecho, es un mecanismo muy simple. No es necesariamente el más eficiente, desde algunos pierna arrastrando ocurrirá, pero que funciona sorprendentemente bien por su sencillez. La idea es que, cuando está en movimiento, el robot tiene siempre tres patas en el suelo y uno levantó. La pareja de tierra tocando la pierna frontal/trasero contralateral dará tracción en la dirección deseada, mientras que la tercera pata tocar tierra será arrastrada a lo largo, realizando un movimiento en contra de la dirección de movimiento del robot. Puesto que el peso del robot debe ser distribuido principalmente en las dos piernas de tracción, la resistencia no será tanto como para impedir el movimiento hacia adelante.
Diseños de robot pueden hacer que uno de la parte delantera o una de las patas traseras, planteadas en cada ciclo de movimiento. Para lograr esto, los ejes de los conjuntos de la pierna deben estar en un ángulo de aproximadamente 25-30 º. El efecto también es más fácil de lograr si ambos conjuntos de pierna son de diferentes tamaños. Empezamos con una variante del diseño de Jérôme Demers (corta alambre: 14 cm, alambre largo: 21 cm) y doblar los alambres hasta que logramos el efecto deseado.
Este diseño simple de la pierna tiene una gran ventaja sobre la pierna articulada diseños como que de la strandbeests de Theo Jansen, hay solamente pocos ángulo preciso y relaciones de tamaño entre las partes de la pierna que funcionan bien. Se desvían de estos, y la pierna será inutilizable. Con rotación de pierna rígida conjuntos, hay un montón de diseños diferentes que trabajo y la usted puede ser creativo y no debe tener ángulos y tamaños dentro de límites precisos. Durante nuestra fase de diseño y prueba, se determinó experimentalmente que es mejor si usted no pone en marcha simultáneamente ambos pares de piernas, pero iniciar primero con las patas delanteras. Con los diseños que emplean sólo un circuito análogo de base de bi esto no era posible. Utilizando un Arduino y dos servos, es muy sencillo de lograr. Nuestros códigos de tratamiento y cero dadas abajo reflejan esta decisión de diseño. Una interesante animación de este paso puede verse en el Tutorial de Walker de Andrew Miller 2-Motor.
Nivel: intermedio. Debe saber algo acerca de:
- Arduino
- Comunicación de Scratch/Arduino usando s2a_fm (ver tutoriales de abajo)
- Usar Bluetooth en Linux
Requisitos: intermedio conocimientos sobre interacción Scratch y Arduino a través de Bluetooth. Leer los siguientes tutoriales para saber cómo integrar Scratch y Arduino Bluetooth:
- Cómo instalar la comunicación cero/Arduino
- Cómo configurar el módulo Bluetooth para la comunicación entre el Scratch y Arduino
- Robótica móvil con Scratch: preparando tu PC Linux, Arduino y cero comunicación inalámbrica vía Bluetooth
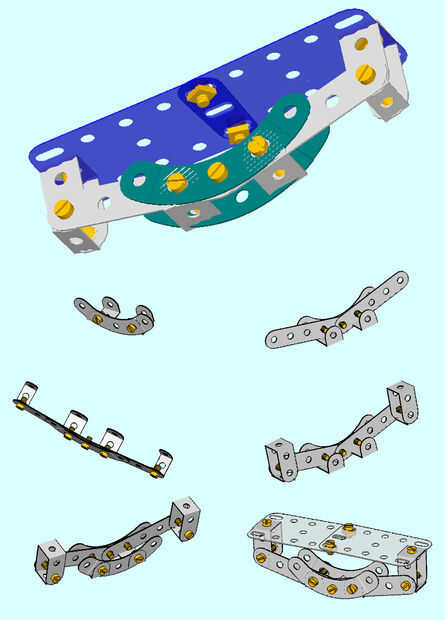
Estructura física:
- Construcción de juguetes con grandes tornillos de metal. Utilizamos piezas de Mecano vintage de eBay, pero hay muchas opciones diferentes disponibles, tales como Modelix.
- 2 placas MDF de pequeño (plástico rígido de una vieja caja hará también)
- 12 lazos de cable de nylon (15cm) para la fijación de los componentes de la estructura
- Percha alambre
- Pegamento para los "pies"
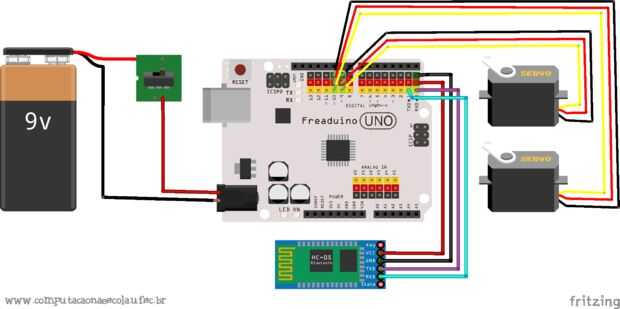
Automatización:
- Arduino Uno o Freaduino. Hemos construido nuestro Animal con un Freaduino. Pero también no sería ningún problema para utilizar otro tablero Arduino-compatible como un Uno o un Nano, por ejemplo.
- Protoboard: El Freaduino no necesita cualquier protoboard para este proyecto. Si está utilizando un Arduino Uno, necesitará un ProtoShield con un protoboard 128 hoyos instalado (Sparkfun vende un kit completo, pero puedes encontrar kits también en eBay y DX). Si está utilizando un Arduino Nano, necesitarás un Protoboard con 400 agujeros (
![]()
a ver cómo colocar el Nano en el tablero). - 2 servos de pequeño hobby (TowerPro SG90 es suficiente)
- Módulo 05 HC o HC-06 Bluetoth (el más simple, el mejor - Mira nuestros tutoriales sobre cero y Bluetooth).
- Cables para prototipado
- Clip de batería y batería de 9V.

Programación:
Usted necesitará una versión de Scratch que tiene bloques extensibles y que implementa el nuevo estándar de comunicación de Scratch HTTP para comunicarse con s2a_fm y Arduino. Hacer los siguientes versiones de Scratch/dialectos:
- Berkeley SNAP! -http:/snap.berkeley.edu
- MIT Scratch 2.0 Editor Offline
- MIT Scratch 2.0 en línea (en la PC solamente)
Sugerimos que usted trabaja en Linux. Las partes de la automatización y las comunicaciones son mucho más fáciles en esta plataforma. Si desea usar MIT Scratch 2.0 fuera de línea y están experimentando dificultades para instalarlo, mira nuestro Tutorial: Cómo instalar MIT Scratch 2 Offline Editor en Linux.
Guía paso a paso sobre cómo construir el andador de robot:
Conoce la informática en la iniciativa de escuelas
Como parte de la informática en la iniciativa de la escuela (http://www.computacaonaescola.ufsc.br), realizamos talleres de la familia como parte de los programas escolares o de forma independiente (ver la última de las imágenes de arriba). Los talleres están dirigidos a niños (6-14 años) acompañados de un padre (o cualquier tipo de miembro adulto de la familia o amigo). Durante el taller los participantes aprenden cómo implementar un pequeño proyecto en Scratch. Nos elegir proyectos donde aprender a programar consiste en simples movimientos y miradas de comandos así como eventos, condicionales y bucles utilizando operadores y comandos también sensado. Mientras que enseñanza al programa, también presentamos conceptos básicos de informáticos como la comprensión de algoritmos para resolver problemas (planteamiento del problema, implementación y ciclo de pruebas), colaboración en forma de programación par así como el entendimiento de que un programa de computadora es un conjunto de instrucciones paso a paso para actuar hacia fuera.
También desarrollamos unidades instruccionales para la enseñanza de programas de computación. Actualmente estamos desarrollando una cero juego programación 12 horas unidad interdisciplinar de las escuelas primarias y una unidad de 24 horas en computación física con SCRATCH y un kit de Arduino de bajo presupuesto para las escuelas medias.
C. Gresse von Wangenheim, A. von Wangenheim. Juego de enseñar programación en talleres familiares. IEEE Computer Magazine, 47(8), agosto de 2014. También disponible en [ResearchGate].
Esta obra está licenciada bajo una licencia Creative Commons Atribución-NoComercial-CompartirIgual 4.0 internacional.








 (impresión 3D)")



 con real robótica, luces y sonido y 36.000 mAh de potencia!!")
