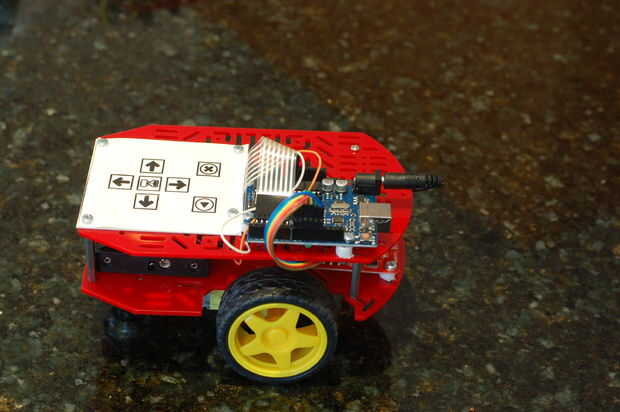

Nuestros alumnos en la escuela de canto de largo (www.longridgeschool.org) construyen robots que pueden aceptar instrucciones básicas de navegación. Pasé mucho tiempo buscando la plataforma adecuada para robots de nuestros estudiantes que apoye los objetivos de aprendizaje. Aunque hay muchos diferentes sistemas de robots educativos son más rápidos y el juego, que no explorar completamente la naturaleza multimodal de la robótica. Nuestro componente de la máquina accionada muestra los modos eléctricos y mecánicos de un robot y proporcionar la infraestructura necesaria para construir un robot autónomo. Aquí está un artículo sobre el robot y el programa se desarrolló alrededor de ella http://www.connecticutplus.com/cplus/information/n...
El proceso se divide en 3 secciones:
- Montar el chasis del robot utilizando - mago chasis (http://sfe.io/p12866).
- Montaje de la electrónica. Nuestros robots utilizan un Arduino Uno, un tablero de conductor del motor y un teclado de membrana.
- Descargando el firmware para el Arduino Uno y aprender a programar el robot.
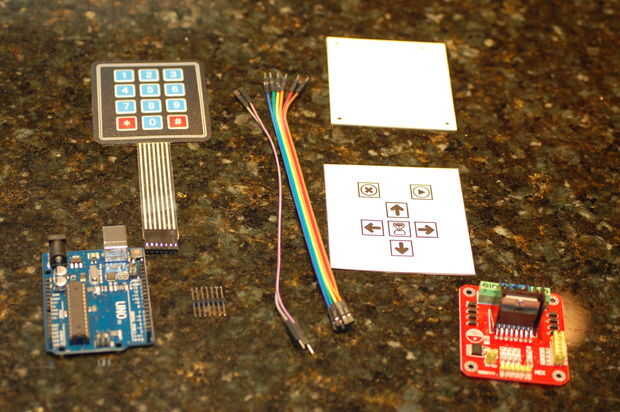
Primer paso en la construcción de un robot es revisar y recoger los suministros. Ingenieros usan BOM (Bill del material) que especifican qué herramientas y materiales en qué cantidad se necesita. En nuestro proyecto los estudiantes usan de los siguientes materiales:
- Chasis del mago para el cuerpo del robot incluyen la mayoría de los tornillos y tuercas (Sparkfun - http://sfe.io/p12866)
- Arduino Uno para la placa base (microcentro)
- Tablero de conductor del motor (tienda de Robot)
- Teclado (Adafruit)
- Cabeceras rectas (Adafruit)
- Cabeceras de ángulo (Sparkfun Electronics)
- Cinco separadores de 37mm de M3 (McMaster)
- Nueve tornillos de 15mm con tuercas (McMaster)
- Dos cables de puente M/F y 5 M/M (Adafruit)
- Plástico estireno 80 x 85 x 1,5 mm
- Tubería de línea aérea de acuario seis 6 mm





 (impresión 3D)")







