Paso 2: programación
La programación parece más confusa de lo que realmente es, hay sólo un montón de variables a ser inicializado. Una vez que todo es control es fácil.
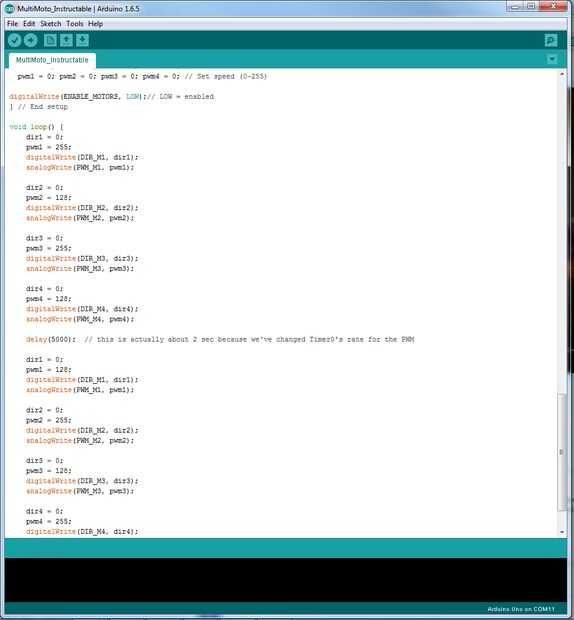
Este código ejecuta el setup luego mueve los actuadores y a media velocidad y velocidad máxima.
Lo importante tener en cuenta al controlar la MultiMoto:
-Utilizar digitalWrite() para permitir que los motores, bajo = habilitado, alto = inhabilitado
-Utilice digitalWrite() sobre los pivotes de dirección para establecer la dirección de los motores. 1 o 0 como extensión o contracción depende de cómo la conexión del actuador a los terminales M1-M4.
-Utilice analogWrite() los pines PWM para la velocidad (0-255)
/* Example code to control up to 4 actuators,using the Robot Power MultiMoto driver. Hardware: - Robot Power MultiMoto - Arduino Uno Wiring: - Connect actuators to the M1, M2, M3, M4 connections on the MultiMoto board. - Connect the negative (black) to the right connection, positive (red) to the left. - Connect a 12 volt source (minimum 1A per motor if unloaded, 8A per motor if fully loaded)to the BAT terminals. Ensure that positive and negative are placed in the correct spots. Code modified by Progressive Automations from the example code provided by Robot Power <a href="http://www.robotpower.com/downloads/" rel="nofollow"> http://www.robotpower.com/downloads/</a> Robot Power MultiMoto v1.0 demo This software is released into the Public Domain */ // include the SPI library: #include <SPI.h> // L9958 slave select pins for SPI #define SS_M4 14 #define SS_M3 13 #define SS_M2 12 #define SS_M1 11 // L9958 DIRection pins #define DIR_M1 2 #define DIR_M2 3 #define DIR_M3 4 #define DIR_M4 7 // L9958 PWM pins #define PWM_M1 9 #define PWM_M2 10 // Timer1 #define PWM_M3 5 #define PWM_M4 6 // Timer0 // L9958 Enable for all 4 motors #define ENABLE_MOTORS 8 int pwm1, pwm2, pwm3, pwm4; boolean dir1, dir2, dir3, dir4; void setup() { unsigned int configWord; // put your setup code here, to run once: pinMode(SS_M1, OUTPUT); digitalWrite(SS_M1, LOW); // HIGH = not selected pinMode(SS_M2, OUTPUT); digitalWrite(SS_M2, LOW); pinMode(SS_M3, OUTPUT); digitalWrite(SS_M3, LOW); pinMode(SS_M4, OUTPUT); digitalWrite(SS_M4, LOW); // L9958 DIRection pins pinMode(DIR_M1, OUTPUT); pinMode(DIR_M2, OUTPUT); pinMode(DIR_M3, OUTPUT); pinMode(DIR_M4, OUTPUT); // L9958 PWM pins pinMode(PWM_M1, OUTPUT); digitalWrite(PWM_M1, LOW); pinMode(PWM_M2, OUTPUT); digitalWrite(PWM_M2, LOW); // Timer1 pinMode(PWM_M3, OUTPUT); digitalWrite(PWM_M3, LOW); pinMode(PWM_M4, OUTPUT); digitalWrite(PWM_M4, LOW); // Timer0 // L9958 Enable for all 4 motors pinMode(ENABLE_MOTORS, OUTPUT); digitalWrite(ENABLE_MOTORS, HIGH); // HIGH = disabled / /******* Set up L9958 chips ********* ' L9958 Config Register ' Bit '0 - RES '1 - DR - reset '2 - CL_1 - curr limit '3 - CL_2 - curr_limit '4 - RES '5 - RES '6 - RES '7 - RES '8 - VSR - voltage slew rate (1 enables slew limit, 0 disables) '9 - ISR - current slew rate (1 enables slew limit, 0 disables) '10 - ISR_DIS - current slew disable '11 - OL_ON - open load enable '12 - RES '13 - RES '14 - 0 - always zero '15 - 0 - always zero */ // set to max current limit and disable ISR slew limiting configWord = 0b0000010000001100; SPI.begin(); SPI.setBitOrder(LSBFIRST); SPI.setDataMode(SPI_MODE1); // clock pol = low, phase = high // Motor 1 digitalWrite(SS_M1, LOW); SPI.transfer(lowByte(configWord)); SPI.transfer(highByte(configWord)); digitalWrite(SS_M1, HIGH); // Motor 2 digitalWrite(SS_M2, LOW); SPI.transfer(lowByte(configWord)); SPI.transfer(highByte(configWord)); digitalWrite(SS_M2, HIGH); // Motor 3 digitalWrite(SS_M3, LOW); SPI.transfer(lowByte(configWord)); SPI.transfer(highByte(configWord)); digitalWrite(SS_M3, HIGH); // Motor 4 digitalWrite(SS_M4, LOW); SPI.transfer(lowByte(configWord)); SPI.transfer(highByte(configWord)); digitalWrite(SS_M4, HIGH); //Set initial actuator settings to pull at 0 speed for safety dir1 = 0; dir2 = 0; dir3 = 0; dir4 = 0; // Set direction pwm1 = 0; pwm2 = 0; pwm3 = 0; pwm4 = 0; // Set speed (0-255) digitalWrite(ENABLE_MOTORS, LOW);// LOW = enabled } // End setup void loop() { dir1 = 1; pwm1 = 255; //set direction and speed digitalWrite(DIR_M1, dir1); analogWrite(PWM_M1, pwm1); // write to pins dir2 = 0; pwm2 = 128; digitalWrite(DIR_M2, dir2); analogWrite(PWM_M2, pwm2); dir3 = 1; pwm3 = 255; digitalWrite(DIR_M3, dir3); analogWrite(PWM_M3, pwm3); dir4 = 0; pwm4 = 128; digitalWrite(DIR_M4, dir4); analogWrite(PWM_M4, pwm4); delay(5000); // wait once all four motors are set dir1 = 0; pwm1 = 128; digitalWrite(DIR_M1, dir1); analogWrite(PWM_M1, pwm1); dir2 = 1; pwm2 = 255; digitalWrite(DIR_M2, dir2); analogWrite(PWM_M2, pwm2); dir3 = 0; pwm3 = 128; digitalWrite(DIR_M3, dir3); analogWrite(PWM_M3, pwm3); dir4 = 1; pwm4 = 255; digitalWrite(DIR_M4, dir4); analogWrite(PWM_M4, pwm4); delay(5000); }//end void loop






")






")