
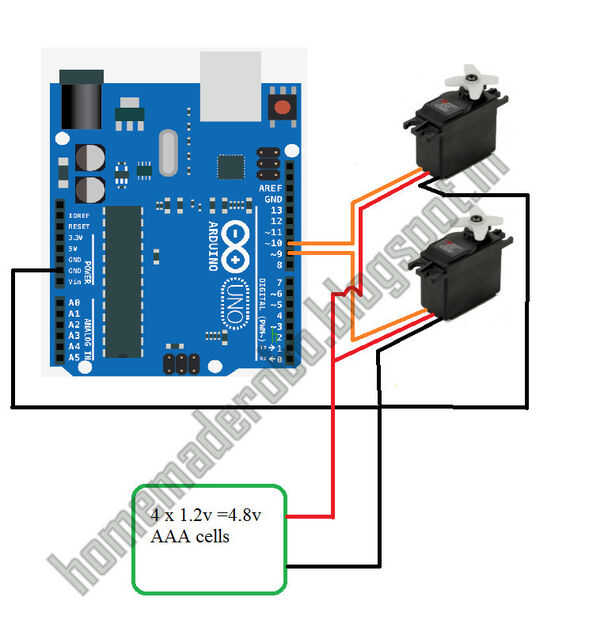






Si tenes un arduino mini y dos servos estándar que usted puede hacer un poco robo a pie en dos 4 patas del animal doméstico.
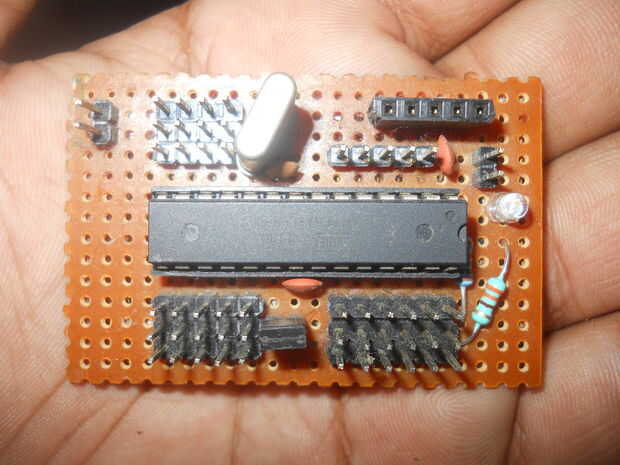
pero en el proyecto no utiliza un arduino original. He utilizado un microcontrolador ATmega8 con cargador de arranque de arduino.
Si estás un poco familiarizado con Microcontroladores AVR y programación isp puede convertir su microcontrolador ATmega8 en un arduino.
Para cargar el bosquejo en a arduino necesita FT232 basado en dispositivo. pero en el lugar vivo im no ha podido conseguirlo. Usé un CP2102.
COMO funciona el microcontrolador ATmega8L de 3,3 v a 5 v no usar cualquier regulador de voltaje.
mi arduino y servos usé 4 * 1.2 = 4.8V baterías Ni-MH (2700mAh). algunas veces estos servos pueden causar Reset del circuito como dibujan más corriente. Para evitar usé 2 * 1000uF condensadores entre Vcc y GND.
sólo mediante el uso de pocas tuercas, pernos, hierro de 3mm (cualquier metal que se puede doblar) de alambre y 2 servos estándar.
mientras doblando el alambre de metal para las piernas, asegúrese de que todas las patas están tocando el suelo correctamente
Revise mi blog para más info y arduino de código:
http://homemaderobo.blogspot.com/2013/10/Arduino-based-quadruped-robot-using-2.html









 Básicos Arduino Robot buscador de luz!")
![[DIY] Araña Robot (robot de Quad, cuadrúpedo)](https://foto.askix.com/thumb/170x110/c/ee/ceede9295111d43b4a1ba30223f7f41c.jpg "[DIY] Araña Robot (robot de Quad, cuadrúpedo)")


