Paso 6: Regulador de aire de músculo Artificial
![]()
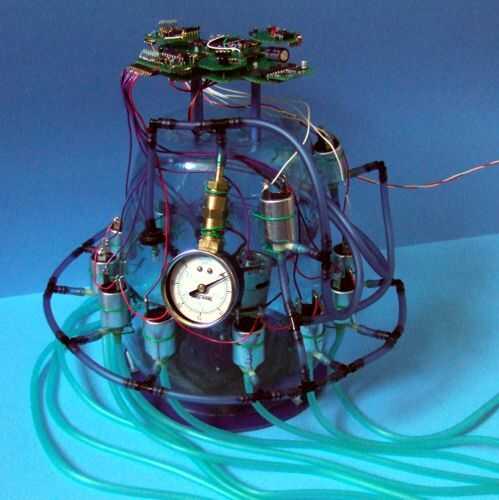
El regulador de aire de robot consiste en 14 electroválvulas control 11 músculos de aire por presión o vacío. He intentado originalmente usando cheapo 3/16" tubo silicona de acuario para los tubos que van desde el controlador del robot. Lamentablemente ellos se derrumbaron bajo un vacío y tuvieron que ser reemplazado con tubo de silicona flexible, más caro. Este tipo de tubería es translúcido blanco y casi pegajosa al tacto. Tiene la ventaja de que es muy flexible y se pega muy bien a Oogoo.
He escrito un detallado instructivo sobre cómo el regulador muscular artificial:
Los solenoides son controlados por Tinkertrons que son las neuronas artificiales del robot. He publicado los detalles de las neuronas y el código de Picaxe para este robot de aquí:








")

")
