Paso 1: Cómo funciona
Anteriormente he hecho músculos artificiales mediante una impresora 3D de silicona de colada y moldes de impresión en ellos. Ver aquí:
Es un método bastante implicado y no produce la misma precisión como la impresión 3d directamente.
Se trata de un método más directo donde los músculos se están directamente 3D impreso usando un filamento flexible llamado Ninjaflex. El patrón de la impresión de una impresora 3D filamento deja muchos huecos microscópicos que no soportará la presión de aire. Así, después de la impresión, los músculos son recubiertos de inmersión en un pegamento flexible elastomérico para sellar los agujeros. Esto les permite retener la presión de aire igual o superior a 22 PSI.
Usé un Makerbot Replicator 2 para hacer que estos músculos, pero pueden utilizarse otras impresoras de filamento que pueden imprimir Ninjaflex.
Esto todavía está en la fase inicial de experimentación, pero muestra gran promesa para la producción de los músculos que pueden sustituir a servos y motores de engranaje en robots. Esto hacen considerablemente menos costosa y cuando se usa en robots blandos, hacen un amistoso más humano para tocar y estar cerca.
Una impresora estéreo-litografía utilizando resinas flexibles, sería posible producir tipos más pequeños y más precisos de músculos y la piel del robot que no puede una impresora de filamento. Podrían imprimirse más intrincados canales de aire y formas inusuales que no necesita soportes. Un robot de flores como este puede ser impreso montado en una sola pieza.
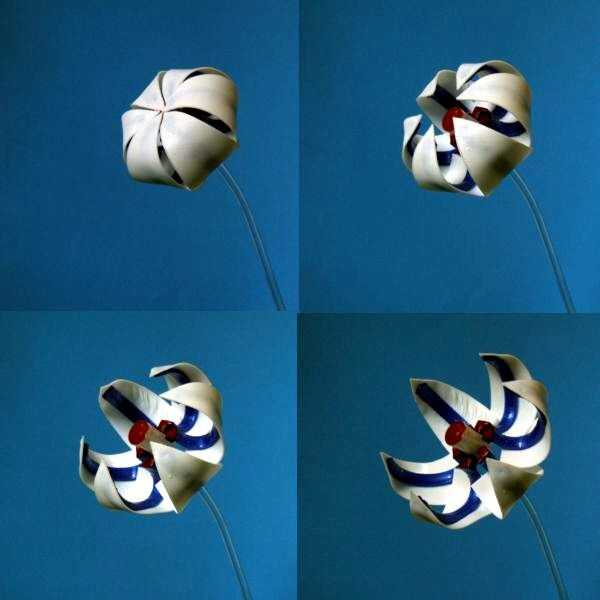
Paso 1 pic muestra la flor cuando los seis músculos están presurizados a 22 PSI.













