Paso 1: chasis

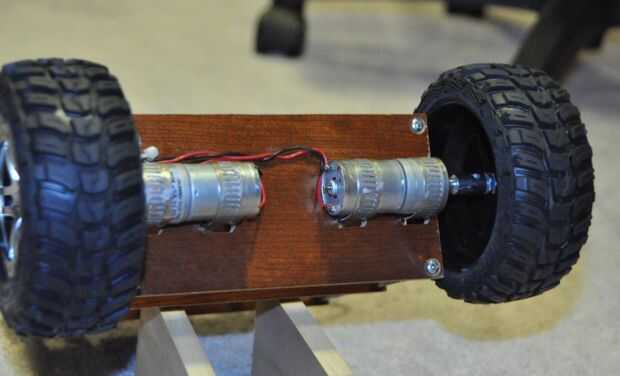
Mi intención con el chasis del robot era mantenerlo simple y utilice el material que estaba disponible para mí. Eso condujo a un diseño de niveles, usando 1/4" madera contrachapada de mi trozo de madera aluminio y cuadro de enfrentamiento. Jugaba con un número de métodos para fijar una ronda motor a una pieza plana de madera contrachapada, pero terminó en el uso de 2 abrazaderas por motor, a través de ranuras en la madera contrachapada.
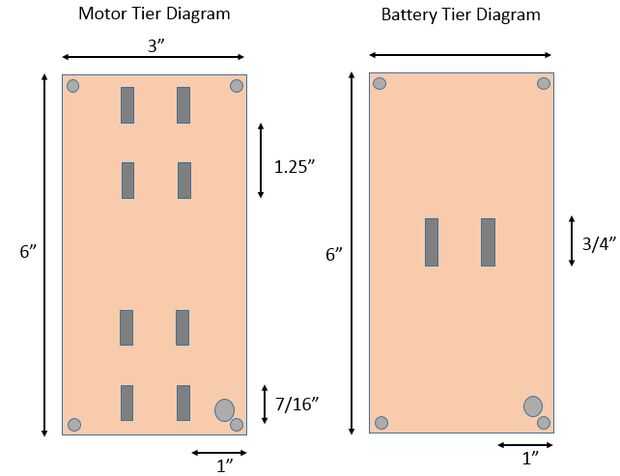
Empecé la Asamblea con el nivel de motor, con las dimensiones indicadas en el diagrama. Usé un 1/4" en mi router, con una guía de borde para cortar 8 ranuras para montar los motores de DC. Perforó los agujeros en cada esquina, contra hundimiento en la parte inferior para que las cabezas de tornillo de montaje estaban al ras. Taladré un agujero más grande en una esquina para la encaminamiento de los cables del motor. Para conectar los motores, abrir las abrazaderas de manguera completamente para permitir que la banda pasen a través de las ranuras y luego volver a conectar las abrazaderas para sostener el motor en su lugar. Montara el módulo del MPU-6050 en el nivel motor, alineando el centro del chip de control principal en el módulo con el eje de impulsión. Utiliza pegamento para unir un conector hembra de 8 pines a la madera contrachapada y acaba de conectar el módulo en el conector.
Nota: usé un agujero en cada nivel para manejo de cables. Esto resulta en la MPU-6050 cables paralelos para toda la altura del robot y motor de corriente continua. Al final, necesitaba a un cable blindado para la conexión de la MPU-6050 debido al acoplamiento con los cables de potencia del motor DC. Probablemente puede evitar la necesidad de un cable blindado aquí separando el motor de la C.C. y el MPU-6050 en lados opuestos del chasis, pero requeriría un segundo alambre gestión agujero de perforación.
Preparar el nivel de la batería fue más directo, con sólo 2 ranuras para la correa de Velcro de la batería y el mismo montaje y cable de dirección orificios de esquina. Yo hundido otra vez contra el montaje de los agujeros en la parte inferior, como el extremo roscado del enfrentamiento no fueron lo suficientemente largos para alcanzar a través de la madera contrachapada de otra manera. Zip-atados las dos baterías y los sujeta a la madera contrachapada con una correa de Velcro práctica encontrar en mi tienda de hobby local.
La preparación de nivel electrónica había involucrada perforación la misma esquina y los agujeros de gestión de cables, así como agujeros de montaje para el tablero de Galileo y el módulo de Bluetooth. Decidí montar el módulo de Bluetooth debajo de la Galileo utilizando separadores más cortos. Como el módulo de Bluetooth no tenía agujeros, que hice con ranuras de corte en el lado de separadores de plástico - estoy seguro de que hay una solución más elegante, simplemente evadió me. El nivel superior fue una construcción aún más sencilla, ya que contiene sólo los 4 agujeros de montaje de la esquina.
Montaje del chasis era entonces sólo la conexión de los 4 niveles utilizando el enfrentamiento, comenzando en un extremo y avanza a la otra.
Para el paso final de la construcción, he utilizado neumáticos de camiones RC en el robot. Pude comprar un conjunto de mi tienda de hobby local, pero son similares a estos en línea. También encontré un adaptador de eje de motor a rueda en la tienda, pero una búsqueda en Internet encontré algo similar aquí.
")








")



