Paso 2: cableado
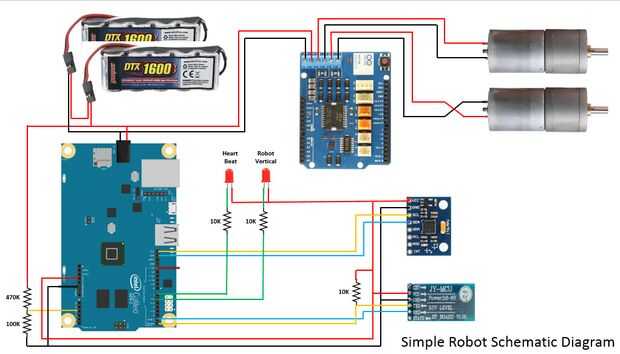
Las conexiones de cableado entre los subsistemas eléctrico del robot se muestran en el diagrama esquemático del cableado.
Para evitar la inclinación de la tensión de la Junta de Galileo, corrí a cables de alimentación separado de la batería al tablero de Galileo y el escudo del motor Arduino. Corte el extremo de una vieja pared-verruga--fuente de alimentación para reutilizar el enchufe de alimentación de 2,1 mm para la conexión a Galileo. El escudo del motor acabará dibujando algunas corriente bastante saludable, usé 20 trenzado calibre alambre para esa conexión a la batería. Usé conectores macho de 3 pines para las conexiones de masa, que encontré en la misma tienda de hobby local - pero tuve algunas dificultades para encontrar el elemento equivalente en línea.
Usé alambre trenzado de calibre 24, terminales del conector pin hembra y calor retráctiles para realizar el cableado entre la Junta de Galileo, el módulo Bluetooth y un blindado, conductor 4, cable entre Galileo y los módulos de acelerómetro/giroscopio MPU-6050 - con el blindaje conectado a tierra en ambos extremos.
Entre la pantalla de control del motor y los motores de DC, utilicé los cables calibre 22 sólido. Observe que las conexiones se invierten en uno de los motores para que el control de la dirección de Galileo hasta el escudo del motor es el mismo para adelante y atrás en ambos motores. También tenga en cuenta que "hacia adelante" es un término relativo y puede cambiarse a través de la conexión entre el escudo del motor y los motores de DC. En pruebas de robot final, necesita asegurarse de que existe correlación entre "adelante" y la salida positiva del regulador de PID - a través de las conexiones del motor o la polaridad de los términos PID.
Usé una de Seeedstudio Arduino protoshield recogido en RadioShack para proporcionar un punto de conexión común/flexible, así como para montar los de LED y resistencias de diversos. La ubicación del componente en el escudo de proto tipo de evolucionado con el tiempo ya acumulado el robot, así que estoy seguro que hay un diseño más óptimo. La especificación de voltaje de suministro Galileo Gen 2 está clasificada 7-12V, y encontré algunas preocupaciones en línea sobre daños en la Junta si se ejecuta con una tensión de alimentación inferior a 7V. Como resultado, he añadido la red del divisor de tensión y la conexión a un análogo de la entrada para que el bosquejo puede supervisar el voltaje de la batería como medida de precaución.
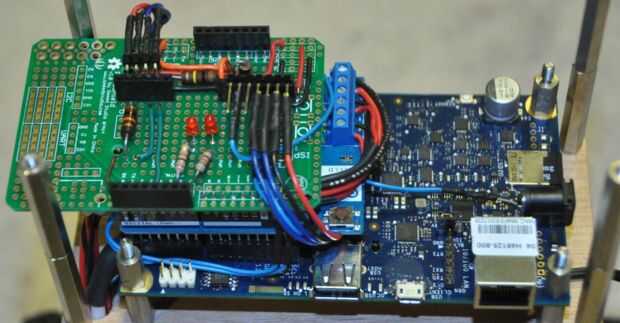
Las conexiones eléctricas entre Galileo y el escudo del motor se logran colocando el escudo del motor al conector de Galileo Arduino, con el escudo de proto apilado en la parte superior el escudo del motor.
Nota: Como la tensión de alimentación de motor de DC es estar conectada directamente con el escudo del motor, corté el rastro de Vin en la pantalla de control del motor usando un cuchillo x-acto para aislar el Galileo y guías de voltaje de suministro de escudo del motor.
Tengo que poner alguna cinta aislante entre el escudo del motor y el escudo de proto para evitar cortocircuitos entre los dos (probablemente una indicación de mis habilidades primitivas de soldaduras).
")








")



