
Mi rover experimental que construido a partir de un reloj de alarma de Roll-A-Way que estaba en liquidación por $5.
Puede controlarse mediante la sección numérica del teclado cuando el puerto serie está conectado a un ordenador o
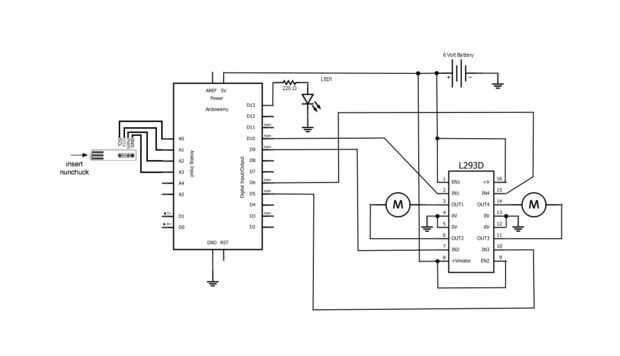
un Wii Nunchuck conectado directamente a él, con la porción de la palanca de mando o el acelerómetro mientras presiona el botón más grande.
Utiliza uno de mi Ardweeny modificado para requisitos particulares y un puente H chip de controlador de motor L293D:
-
- http://www.freewebs.com/isuru-c/motor_driver.htm
Aquí está un video de vista previa:
Asimilado reloj Roll-A-Way de la Royal Air Force Cellucci on Vimeo.
Mi siguiente paso sería hacer inalámbrico y añadir un par de sensores; Yo estaba pensando una pequeña cámara inalámbrica, sin embargo porque rollos así que mucho no sería muy práctico.
Espero que os guste esta igual como lo hice, aprendí un par de cosas en el camino. Construí este al mismo tiempo mientras que trabaja en dos diferentes robots y rovers, sin embargo éste fue más simple en requisitos del hardware y el código, y veo un gran potencial para aprender de él y expansión de él. También si encuentras demasiado apretado para poner todos los componentes dentro de usted siempre pueden utilizar el código y el hardware en un marco modificado para requisitos particulares más grande.
Por favor me avisan si algo no está claro o necesitas más detalles.
Incluido es mi código: Roll_A_Way_Rover_v1_1.pde

")






")




