Paso 2: Base móvil: arduino controlar roomba





Ahora, es imposible encontrar un macho para esta interfaz. Hay tantos minidin ahi! http://en.wikipedia.org/wiki/mini-DIN_connector
Así que, aquí está el secreto que va a hacer de este instructable conjunto vale la pena: el conector es el mismo que la antigua interfaz de serie de Macintosh uno. Tengo un montón de los cables en una computadora usada tienda de 1 euro!
5 pernos son de interés:
-2 pines de potencia para el arduino (yo les conectado en el pin de vin de arduino)
-1 pasador que permite a 'despertar' la Roomba
-2 pines para comunicación serial (Rx, TX)
Simplemente corte el cable de apple y soldado 5 cabeceras por lo que pude conectar dicho cable en un protoboard y el resto del proyecto no necesita ninguna soldadura más.
Hemos añadido una llave grande (como era obligatorio para el concurso) en el + Vcc cable lo más cerca posible de la batería.
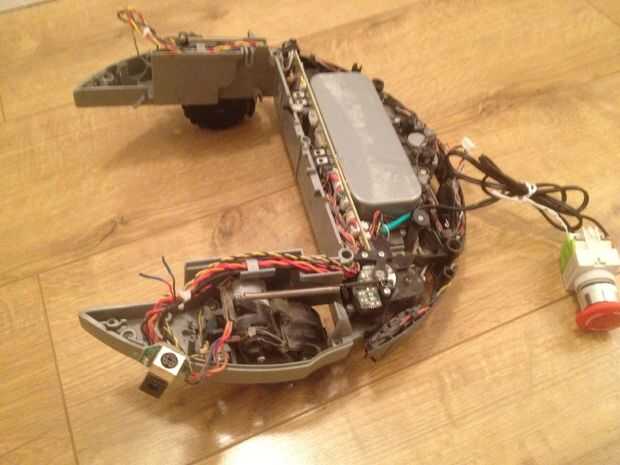
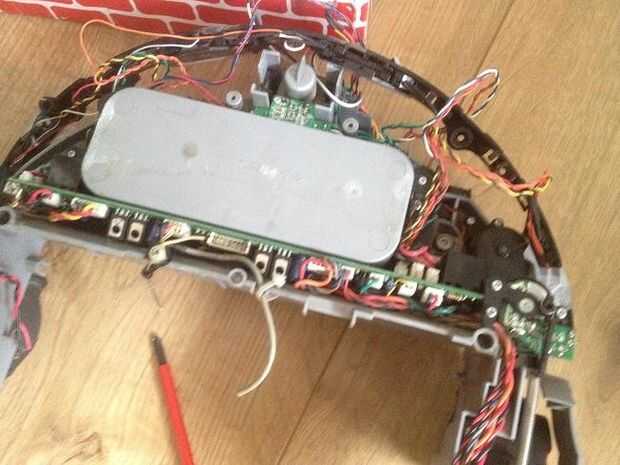
También tuvimos que cortar un poco el cuerpo de la Roomba para adaptarse a las dimensiones de la competencia (100cm de perímetro), hasta el punto que el ojo inexperto no sospecharía que nuestra base es una Roomba!
Pudimos desconectar el panel de control de la Roomba y mayoría de los sensores pero no los 4 sensores IR en el parachoques. Sin dichos sensores, la Roomba es sólo un ladrillo de lujo.













