Paso 3: Conecte un nunchuk por RJ45



WiiChuck adaptadores funcionan bien a primera vista pero acaba finalmente freír tu nunchuk. Yo aprendí la manera dura y decidí hacer algo al respecto como echaste a perder el cuarto y último, nunchuk muerto de la casa...
Nunchuk son dispositivos i2c y requieren de 3, 3V (no 5v). Esto significa que no pueden usar los pines analógicos para el nunchuk de la energía, tienes que usar el 3.3v pin. Consiguió con no adaptar el voltaje de los pines de 2 comunicación.
Compré unos nunchacos no marca en 5$ un trozo en lugar de los oficiales en $20 + un pedazo. 1 de cada 5 era DOA, todavía un acuerdo aceptable aunque y trabajan bien.
No he podido conseguir la biblioteca de clásicos nunchuk para arduino para que funcione correctamente y encontré mucho hacia adelante una que personalizado un poco.
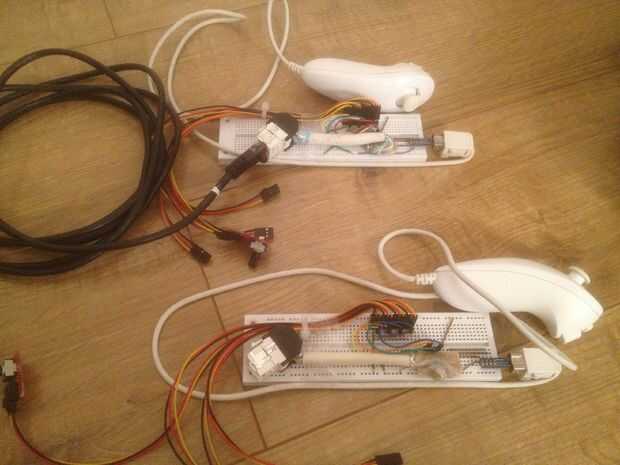
El concurso estuvo abierto a robots controlados por el alambre. Los niños en nuestro equipo tuvieron 2 nunchacos en mano conectado a un protoboard. Dicha placa tiene una toma RJ45 hembra está conectado a la placa que vive en la roomba a través de un cable RJ45 ethernet estándar.
Así que tenemos 8 alambres entre la caja de control y el robot:
-gnd
-vcc (3.3v)
-pin1 blanco nunchuk
-pin2 blanco nunchuk
-pin1 negro nunchuk
-pin2 negro nunchuk
-Presione el boton A
-botón B
El nunchuk blanco está conectado a la placa arduino que está conectada al puerto serial de la Roomba.
El negro nunchuk está conectado a la placa arduino que controla los servomotores. Más sobre esto más adelante.
El código es bastante auto-explicativo que creo.













