Paso 2: Diseño de cambios - versión 2
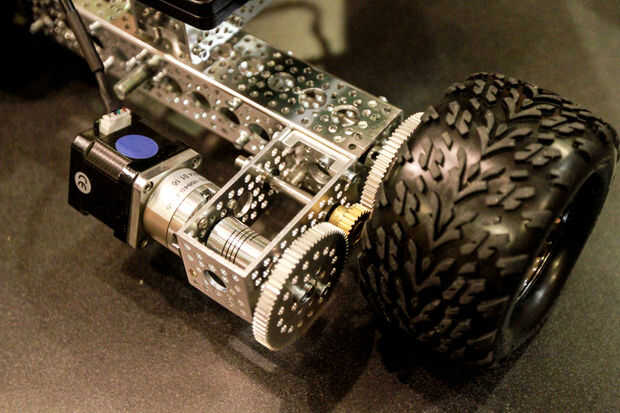
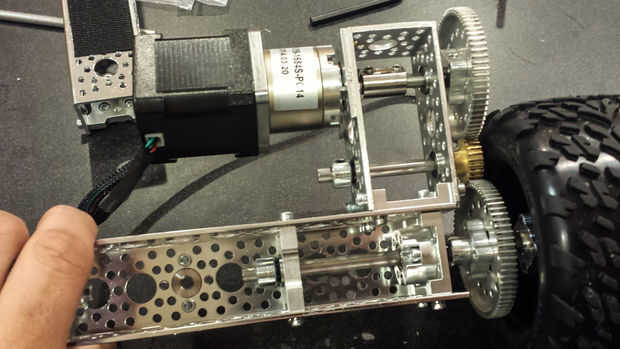
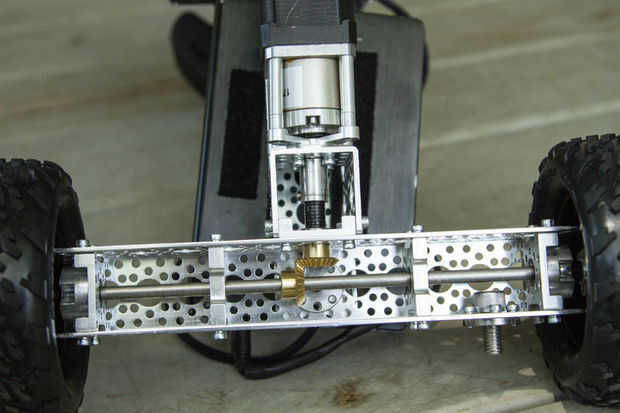
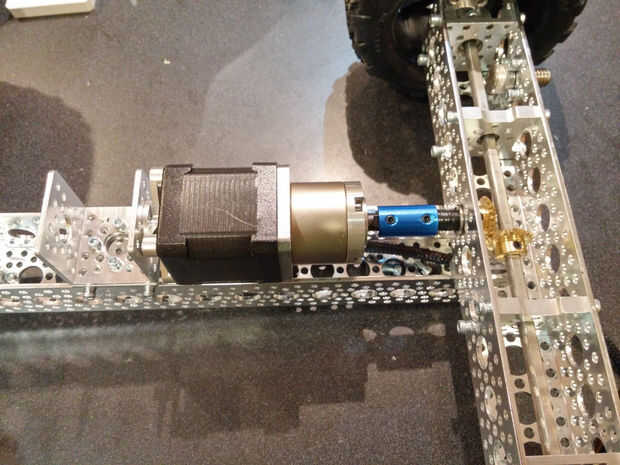

El diseño original utiliza un motor paso a paso para conducir una rueda en el eje trasero. Utiliza una combinación de engranajes de eje con el motor montado en algún canal de aluminio offset. Aunque esto parece funcionar bien, tomé la decisión para ambas ruedas traseras una vez vino una nueva opción en el mercado. Engranajes cónicos me dio la opción de moverse el motor paso a paso por debajo de la costilla principal de aluminio y gire el eje trasero entero. Distribuye el peso uniformemente en rover, así, como paso a paso motores son bastante pesados. El único cambio que haría que el diseño es el uso de la montaje motor NEMA 17. Puesto que los motores paso a paso que he comprado de eMotimo y paso a paso en línea tienen engranajes planetarios, tener más de un montaje al ras eliminaría la necesidad para tornillos métricos de la especialidad de orden y espaciadores. Desafortunadamente, el motor planetario montaje de ServoCity no cabe el patrón de agujeros de tornillo en el eMotimo o motores paso a paso Stepperonline.
*** Para otro proyecto, he podido utilizar un taladro para ampliar el patrón de agujeros del montaje de engranaje planetario ServoCity y obligarlo a trabajar. No estoy seguro si los patrones de agujero para imperial frente a métrica, pero hasta que ellos vienen con una parte diferente que se adapte, te recomiendo que uses el montaje NEMA 17.













