Paso 7: Cableado hasta la Edison de Intel para el conductor del Motor de Sparkfun

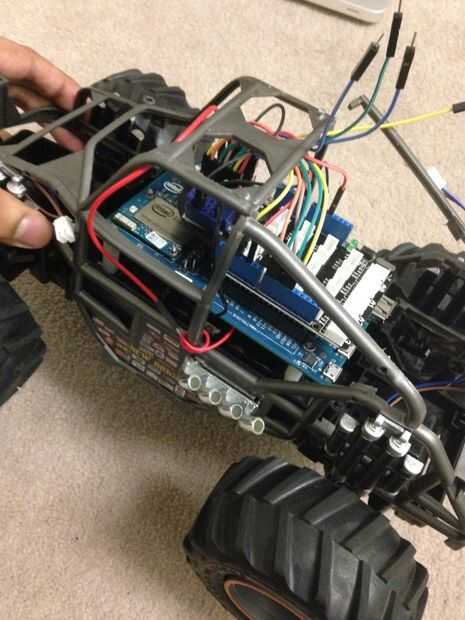
Ahora para el cableado primero Conecte la señal de la mitad de Sparkfun motor driver (TB6612FNG salir que es doble puente de H) a la pantalla de la base como se muestra en la primera foto, aquí están las conexiones
- STBY al pin 10 en el escudo de base que actúan como el modo de espera
Para controlar el nuevo motor de la camioneta
- PWMA a pin 3 - este es un pin PWM para controlar la velocidad del motor
- AIN1 al pin 9
- AIN2 al pin 8 - ambos estos pernos decidan la dirección que hará girar las ruedas traseras.
Para controlar el motor delantero que proporciona dirección a la camioneta
- PWMB al pin 5
- BIN1 al pin11
- BIN2 al pin 12
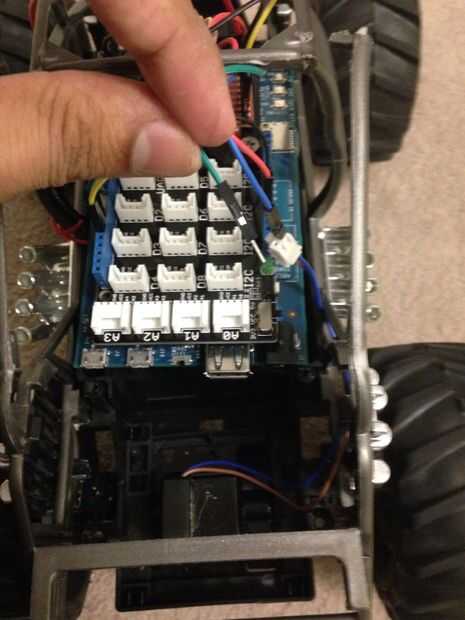
Ahora inserte el montaje de la Junta en su rover y completar el otro lado de las conexiones, es decir
- A01 a un terminal del motor trasero como se muestra en la segunda foto de arriba
- A02 a otro terminal
- B01 a un terminal del motor delantero
- B02 a otro terminal
Entonces al arrancar el motor
- Conectarse a VCC de la batería + ve
- y GND que a la tierra de la batería de nuevo, aquí es donde usar la Mini tabla de pan para hacer una conexión a tierra común a la protección de base de Grove
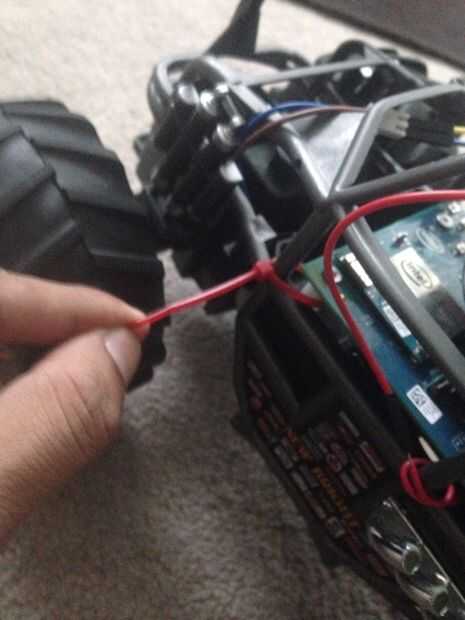
Tip: Se trata de una pieza bastante cara de hardware así que una sugerencia aquí sería utilizar, zip lazos para asegurar la placa a la base. Y también utilizar cinta aislante donde nunca necesaria para evitar cortos circuitos...





")
")






