Paso 8: El Software (Linux de tiempo Real)
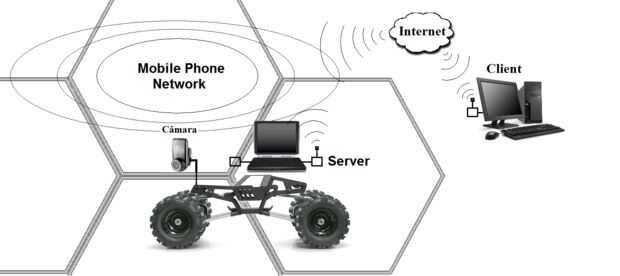
API de Xenomai para un "ambiente de computación de tiempo real" con el fin de controlar y predecir
latencia de local.
Construcción de un Xenomai parcheado Linux paquete de núcleo en el servidor puede hacerse por
siguiendo estas sencillas instrucciones:
http://www.federicololli.com/xenomaifoxg20.htm
Después de seguir estas instrucciones ahora tienes un sistema operativo instalado en el
FoxBoardG20.
0 - el software necesario de Linux Debian en el FoxBoard G20:
0.1 - Webcam driver llamado v4l - http://packages.debian.org/sid/v4l-conf
0.2 - USB Modeswitch aplicación - http://www.draisberghof.de/usb_modeswitch/
0.3 - Sakis3G todo en uno script - http://sakis3G.org
0.4 - instalar Apache2 - #apt-get install apache2
¿Qué es Sakis3G?
Sakis3G es un script de shell ajustado que tiene que para trabajar fuera de la caja para
establecer una conexión 3G con cualquier combinación de módem o de operador.
Automáticamente configuraciones tu USB o Bluetooth™ del módem y puede incluso detectar
ajustes del operador. Debe intentarlo cuando todo lo demás falla.
Si usted es bastante afortunado, puede ser conectados después de 30 segundos
1 - descargar el código de fuente del lado de servidor:
http://DL.Dropbox.com/u/4302919/FoxBoard_Server.rar
Instrucciones:
1.1 - descomprimir el archivo
1.2 - cambie el directorio a FoxBoardServer\FOXSERVER
1.3 - para volver a compilar el código de tipo: "hacer" en la línea de comandos terminal
1.4 - cambie el directorio a FoxBoardServer
1.5 - Conecte el 3,5 G módem el FoxBoard G20 mediante un cable USB
1.6 - Conecte la cámara Web para el FoxBoard G20 mediante un cable USB
1.7 - para empezar el tipo de servidor: ". / 1_inicia_3G_modem.sh" en el comando
línea terminal
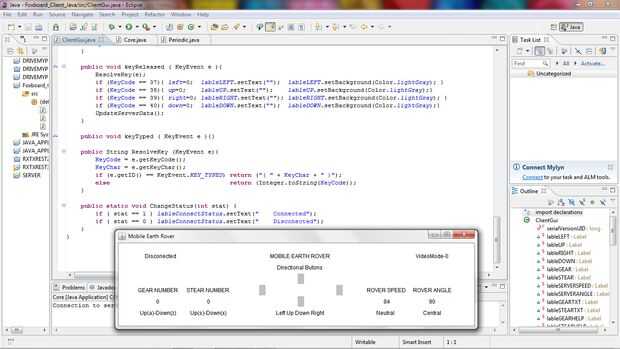
3 - descargar el código fuente del lado del cliente:
http://DL.Dropbox.com/u/4302919/Foxboard_Client_Java.rar
Instrucciones:
3.1 - descomprimir el archivo
3.2 - IDE Insatall Eclipse-Java-Indigo http://www.eclipse.org/
3.3 - Abra un nuevo proyecto con el proyecto contenida en la carpeta de Lea
3.4 - cambiar la URL en la clase base usando el DYNDNS de la FoxBoardG20
clase base {}
estática serverSocket Socket;
//Change aquí según su nombre de host o ip
Static String URL = "ualg.homeip.net";
Static int puerto = 21, período = 50;
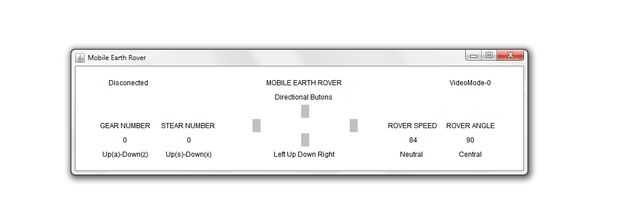
3.5 - ejecute el programa y controlar al vehículo utilizando el teclado de la computadora
-tecla "c" para conectar a la rover en ordr para controlarla.
-Presione "d" para desconectar de forma el rover.
-Presione "UP" flecha Escpara avanzar el Rover
-Pulsa "Abajo" tecla de flecha para mover el Rover hacia atrás
-tecla de flecha "Izquierda" a la izquierda
-tecla de flecha "Derecha" para girar a la derecha
-Presione la tecla "a" para aumentar la aceleración del motor principal de rover
-Presione "z" la clave para decrese la aceleración del motor principal de rover
-Pulse "s" la clave para aumentar la aceleración del motor de servo dirección de rover
-Pulse "x" tecla a decrese la aceleración del motor de servo dirección de rover
-Pulse "h" clave para aumentar el neutro gear aceleración forman el motor principal de rovers
-tecla "n" para disminuir la forma de engranaje neutral aceleración el motor principal de rovers
-tecla Pulse "j" para aumentar el engranaje neutral aceleración forman el motor de servo de rovers
-tecla Pulse "m" para disminuir la velocidad de aceleración neutral forman el motor de servo de rovers
4 - el software para Video Streaming del servidor se llama mjpg_streamer:
http://skillfulness.blogspot.pt/2010/03/MJPG-Streamer-Documentation.html
5 - el software para la transmisión de Audio en el servidor se llama murmullo:
http://Mumble.sourceforge.net/Running_Murmur
6 - el software para ver la secuencia de vídeo en el cliente es cualquier navegador web
(URL server_ip:port).
7 - el software para la optimización en el flujo de Audio en el lado del cliente se llama Mumble:
http://Mumble.sourceforge.net/Installing_Mumble
8 - actualizar direcciones IP en servicios de DNS dinámico. Actualizar su dirección IP dinámica
en DynDNS.com al crear una cuenta:
http://Dyn.com/DNS/
9 - instalar y configurar a un cliente ddclient en el móvil tierra Rover FoxBoard del g-20 equipo:
http://www.debianadmin.com/ddclient-Update-IP-addresses-at-Dynamic-DNS-Service.html
Eso es, eres bueno para ir, o dejar que otras personas ir a explorar!
/***************************************************************************************************************/ / *** /
Para cualquier pregunta por favor envíeme un correo electrónico a:
mobilearthrover
Tiene construcción de diversión y exploración feliz!!!!!!
Compruebe hacia fuera el móvil tierra Rover uno:





")







