Paso 3: Conexiones de piloto automático
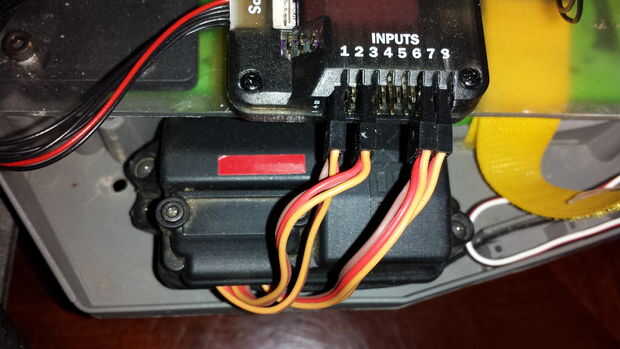
La segunda imagen muestra la forma correcta de conectar los cables del receptor a la entrada del ArduPilot.
RX Ch 1 -> Ch entrada APM 1
RX Ch 2 -> APM entrada Ch 3
RX Ch 3 -> Ch entrada APM 7
RX Ch 4 -> APM entrada Ch 8
¡ IMPORTANTE!
El conector de salida tendrá que modificarse quitando el cable rojo del conector. Esto se puede hacer levantando la lengüeta de plástico y sacar el cable rojo. Esto debe hecha porque pone el Traxxas ESC BEC 6V y arruinará el APM. Una vez que haya extraído el cable del conector, puede ser pegado con cinta aislante, que es el método preferido, o cortar si no tendrá que utilizar en el futuro.
El tablero estará equipado con el BEC externo y puede ser conectado a cualquiera de las salidas APM excepto canal 1 o 3. Asegúrese de que el BEC externo se encuentra a la salida de 5V y no es de 6V.
En este punto, usted también debe asegurarse que el jumper J1 es en lugar de la APM para que el BEC externo potencia la Junta y la electrónica del camión. Si utiliza dos fuentes de alimentación separadas (más avanzadas) o utiliza el módulo de potencia de 3DR junto con una salida diferente, entonces usted no podrá utilizar el jumper J1 y tendrá que quitar.
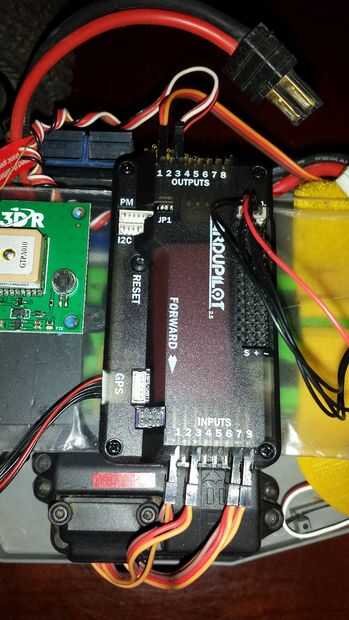
El ESC (con el cable rojo eliminado) se conecta al canal 3 de la salida APM. Una extensión de servo se conecta al canal 1 de la salida APM y el otro extremo del cable debe ir al servo. Si el cable se alcanza debido a su colocación, no tendrá la extensión. Estas conexiones se muestran en la tercera imagen.
Mira la segunda imagen, verás los cables que solía del receptor de la APM fueron demasiado cortos así que Spec cables más largo en las partes listado pero esas longitudes sólo se aplican si usted monta la misma manera como en la imagen. Si desea que el APM montado en el eje del carro, necesitarás cables más largos.
Una vez que cosas montado y conectado, haya terminado con la construcción! Añadir tu propia cámara luego para divertirse y ver cómo el rover navega en su propio!

")
")



")






