



































Hola se trata de las instrucciones y la programación para el coche de lego.
Comparar cómo el vehículo rover conduce los bueyes cuando se utiliza el generador de dirección (programa Steer_Power) vs el manejo controlado por programa (programa Motor dirigir). ¿Puede decir la diferencia? Sugerencia: Trate de girar el volante lentamente y rápidamente. ¿Qué crees que causa esta diferencia? Sugerencia: Un generador electrico no es 100% eficiente, y algunos electricidad se pierde.
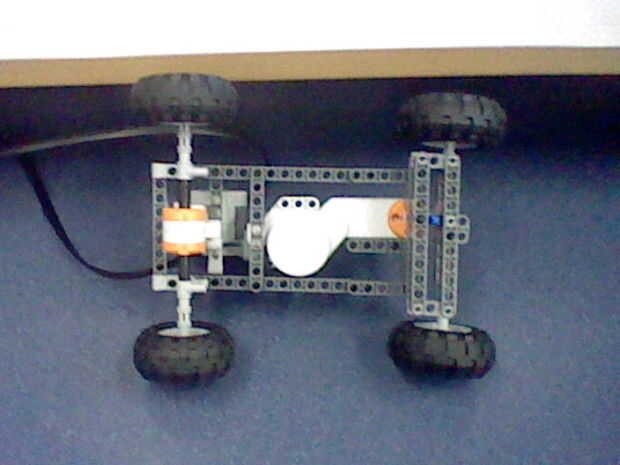
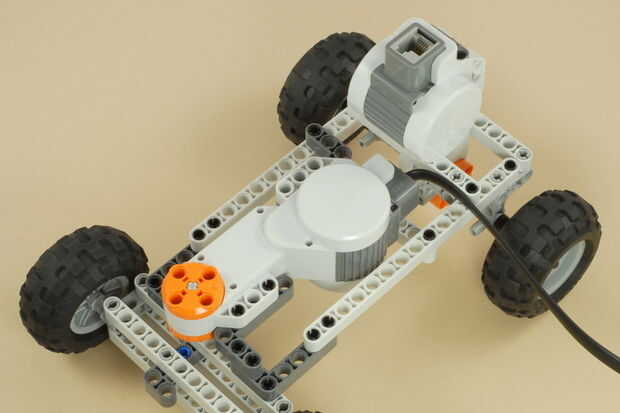
Cuando usted dirigir bruscamente a un lado, usted notará que el vehículo no gira muy bien, y las ruedas delanteras podrían empezar a deslizar hacia los lados. ¿Por qué crees que es? Imaginar el dibujo de trayectorias de la circular que las cuatro ruedas están tratando de seguir para hacer un giro brusco. ¿Qué les impide siguiendo las trayectorias circulares ideal? Si quita la clavija azul en el frente la palanca, que está diseñada para limitar el ángulo de dirección, la dirección puede hacer el vehículo intenta alejarse aún más, que hará aún más visible el problema. Hay realmente dos problemas que causan, como se explica en los siguientes dos desafíos.
Un problema con el diseño que hace se vuelve agudo no funciona bien es que las ruedas traseras son ambos obligadas a ir a la misma velocidad debido al eje sólido de conexión les. Al hacer un giro, las necesidades de la rueda exterior gire más rápido que el interior de la rueda para evitar resbalones, pero el eje sólido evita esto y las ruedas traseras van que al mismo ritmo hace que el vehículo resiste a torneado. Coches reales utilizan un diferencial a resolver este problema. Hay realmente una pieza LEGO Technic diseñada para esto, se muestra a continuación con los engranajes y ejes que la hacen trabajar para esta solución. Si tienes esta parte, puede tratar de modificar el vehículo para añadirlo. El motor de accionamiento de la rueda trasera va a querer uno de los dos engranajes integrado en el gris del diferencial de la vivienda en lugar de cualquiera de los dos ejes del coche.
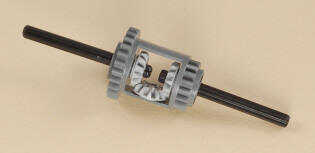
También es posible pero difícil de hacer su propio diferencial de otras partes de la técnica. Si usted busca el internet usted puede encontrar fotos de diferentes diseños que personas han utilizado.
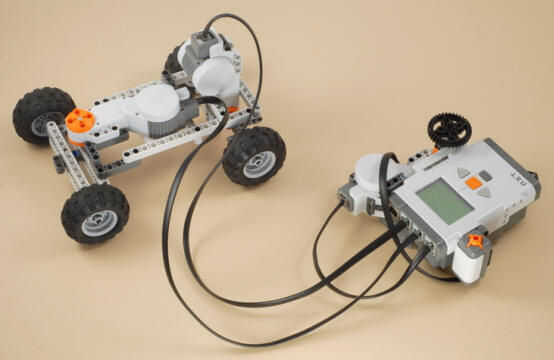
El segundo problema que afecta a la dirección es con las ruedas delanteras. Aunque las ruedas delanteras pueden girar a diferentes velocidades, el brazo paralelo del mecanismo de dirección en esta hace de vehículo girar ambas ruedas en el mismo ángulo, pero esto es no lo que quieres para un sharp gire. Si dirigir en un ángulo agudo y mirar las ruedas delanteras, se verá que no se encuentran en los ángulos correctos para seguir alrededor de las trayectorias circulares adecuadas es necesario. El interior de la rueda debe girar en un ángulo mayor que puede conducir el interior rueda alrededor de un círculo de un radio más pequeño que la rueda exterior. Una solución a esto se llama manejo de Ackermann, que también se utiliza en diversas formas en coches reales. Lograr esto con lego es muy complicado, pero si usted busca para lego te manejo de Ackermann encontrará algunas ideas. ¿Utilizando el mecanismo de dirección para este vehículo, puede usted diseñar su propia autónoma (no controlada remoto) vehículo con el ladrillo NXT que con programa de control? Programación de proyecto NXT.
Haga clic aquí para información.

")











