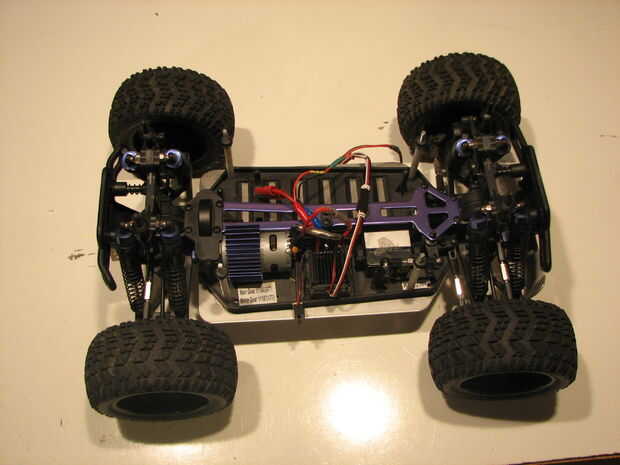

Este tutorial te enseñará cómo construir a su propio robot rover. Estoy usando un coche eléctrico escala 1/10, un camión para ser específica, pero cualquier tipo de coche va a hacer (aunque algunos son más fáciles de trabajar con que otros). Nuestro objetivo será construir un rover autónomo que puede navegar un curso por sí solo.
En primer lugar, modificaremos el chasis por lo que contamos con una plataforma para montar nuestra electrónica y sensores. Montaremos nuestro microcontrolador a la plataforma. A continuación vamos a añadir un sensor de rueda para medir la distancia recorrida.
Partes:
- Sparkfun rueda Encoder Kit - se trata de un codificador magnético que es fácil de montar y funciona bastante bien.
- Exceder RC escala 1/10 eléctrica carro o camioneta (de nitrorcx.com) - usaba el camión "Infinitivo", pero el cochecito "Sunfire" también es una buena opción, sólo depende de lo que te gusta el look de.
- Chip A chip * 32U4 prime - Arduino microcontrolador compatible - tiene varias versiones de este; Me gusta porque tiene muchos pines de alimentación y otras opciones, así como un lector de tarjetas SD, un zumbador, algunos botones y LEDs.
- Mínimo de chip v3 - un sensor opcional, pero importante que se suma una brújula y giroscopio que nos dan información de partida. Además, contiene un acelerómetro de 3 ejes que permite que el rover saber depende de que manera y si es golpeado.
- Hardware - #6 por 3" tornillos (x4) y tuercas (x8); alrededor de los espaciadores de nylon para tornillos de #6, 2,5 pulgadas de largo (yo usé a dos espaciadores de 1,25 pulgadas) (x 4), arandelas de goma para tornillos de #6 (x4).
- Tablero contrachapado - unos 9" por 6" (para sensores de montaje y electrónica).










")


