Paso 11: Iniciando el bot
El USB para alimentar el IPC.
Para arrancar el código bot, inicie sesión como el usuario pi y ejecutar:
- CD rover
- sudo python restrover.py
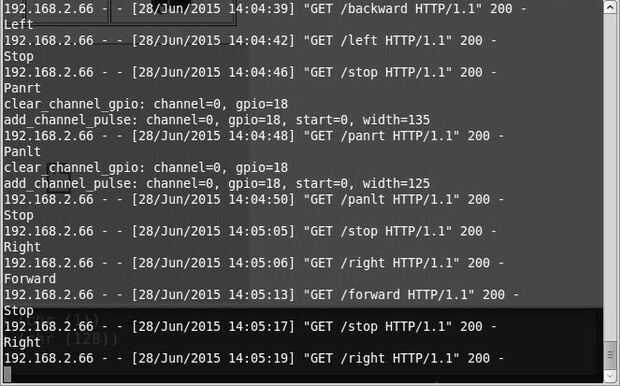
Si todo fue OK, veremos una pantalla similar a la imagen en este paso
Si ves cualquier error o problemas, deberás arreglar antes de ir hacia adelante.
Ahora Conecte el el cable GND (-) al borne de la entrada de energía motor RoboClaw NEG (-).



 - Makeblock, Arduino, Droidscript")





")
 con Video Stream en vivo!!")


